|
MAV'RIC
|
MAVLink comm protocol generated from common.xml. More...
#include "../protocol.h"#include "./mavlink_msg_heartbeat.h"#include "./mavlink_msg_sys_status.h"#include "./mavlink_msg_system_time.h"#include "./mavlink_msg_ping.h"#include "./mavlink_msg_change_operator_control.h"#include "./mavlink_msg_change_operator_control_ack.h"#include "./mavlink_msg_auth_key.h"#include "./mavlink_msg_set_mode.h"#include "./mavlink_msg_param_request_read.h"#include "./mavlink_msg_param_request_list.h"#include "./mavlink_msg_param_value.h"#include "./mavlink_msg_param_set.h"#include "./mavlink_msg_gps_raw_int.h"#include "./mavlink_msg_gps_status.h"#include "./mavlink_msg_scaled_imu.h"#include "./mavlink_msg_raw_imu.h"#include "./mavlink_msg_raw_pressure.h"#include "./mavlink_msg_scaled_pressure.h"#include "./mavlink_msg_attitude.h"#include "./mavlink_msg_attitude_quaternion.h"#include "./mavlink_msg_local_position_ned.h"#include "./mavlink_msg_global_position_int.h"#include "./mavlink_msg_rc_channels_scaled.h"#include "./mavlink_msg_rc_channels_raw.h"#include "./mavlink_msg_servo_output_raw.h"#include "./mavlink_msg_mission_request_partial_list.h"#include "./mavlink_msg_mission_write_partial_list.h"#include "./mavlink_msg_mission_item.h"#include "./mavlink_msg_mission_request.h"#include "./mavlink_msg_mission_set_current.h"#include "./mavlink_msg_mission_current.h"#include "./mavlink_msg_mission_request_list.h"#include "./mavlink_msg_mission_count.h"#include "./mavlink_msg_mission_clear_all.h"#include "./mavlink_msg_mission_item_reached.h"#include "./mavlink_msg_mission_ack.h"#include "./mavlink_msg_set_gps_global_origin.h"#include "./mavlink_msg_gps_global_origin.h"#include "./mavlink_msg_safety_set_allowed_area.h"#include "./mavlink_msg_safety_allowed_area.h"#include "./mavlink_msg_attitude_quaternion_cov.h"#include "./mavlink_msg_nav_controller_output.h"#include "./mavlink_msg_global_position_int_cov.h"#include "./mavlink_msg_local_position_ned_cov.h"#include "./mavlink_msg_rc_channels.h"#include "./mavlink_msg_request_data_stream.h"#include "./mavlink_msg_data_stream.h"#include "./mavlink_msg_manual_control.h"#include "./mavlink_msg_rc_channels_override.h"#include "./mavlink_msg_mission_item_int.h"#include "./mavlink_msg_vfr_hud.h"#include "./mavlink_msg_command_int.h"#include "./mavlink_msg_command_long.h"#include "./mavlink_msg_command_ack.h"#include "./mavlink_msg_manual_setpoint.h"#include "./mavlink_msg_set_attitude_target.h"#include "./mavlink_msg_attitude_target.h"#include "./mavlink_msg_set_position_target_local_ned.h"#include "./mavlink_msg_position_target_local_ned.h"#include "./mavlink_msg_set_position_target_global_int.h"#include "./mavlink_msg_position_target_global_int.h"#include "./mavlink_msg_local_position_ned_system_global_offset.h"#include "./mavlink_msg_hil_state.h"#include "./mavlink_msg_hil_controls.h"#include "./mavlink_msg_hil_rc_inputs_raw.h"#include "./mavlink_msg_optical_flow.h"#include "./mavlink_msg_global_vision_position_estimate.h"#include "./mavlink_msg_vision_position_estimate.h"#include "./mavlink_msg_vision_speed_estimate.h"#include "./mavlink_msg_vicon_position_estimate.h"#include "./mavlink_msg_highres_imu.h"#include "./mavlink_msg_omnidirectional_flow.h"#include "./mavlink_msg_hil_sensor.h"#include "./mavlink_msg_sim_state.h"#include "./mavlink_msg_radio_status.h"#include "./mavlink_msg_file_transfer_protocol.h"#include "./mavlink_msg_hil_gps.h"#include "./mavlink_msg_hil_optical_flow.h"#include "./mavlink_msg_hil_state_quaternion.h"#include "./mavlink_msg_scaled_imu2.h"#include "./mavlink_msg_log_request_list.h"#include "./mavlink_msg_log_entry.h"#include "./mavlink_msg_log_request_data.h"#include "./mavlink_msg_log_data.h"#include "./mavlink_msg_log_erase.h"#include "./mavlink_msg_log_request_end.h"#include "./mavlink_msg_gps_inject_data.h"#include "./mavlink_msg_gps2_raw.h"#include "./mavlink_msg_power_status.h"#include "./mavlink_msg_serial_control.h"#include "./mavlink_msg_gps_rtk.h"#include "./mavlink_msg_gps2_rtk.h"#include "./mavlink_msg_data_transmission_handshake.h"#include "./mavlink_msg_encapsulated_data.h"#include "./mavlink_msg_distance_sensor.h"#include "./mavlink_msg_terrain_request.h"#include "./mavlink_msg_terrain_data.h"#include "./mavlink_msg_terrain_check.h"#include "./mavlink_msg_terrain_report.h"#include "./mavlink_msg_battery_status.h"#include "./mavlink_msg_autopilot_version.h"#include "./mavlink_msg_v2_extension.h"#include "./mavlink_msg_memory_vect.h"#include "./mavlink_msg_debug_vect.h"#include "./mavlink_msg_named_value_float.h"#include "./mavlink_msg_named_value_int.h"#include "./mavlink_msg_statustext.h"#include "./mavlink_msg_debug.h"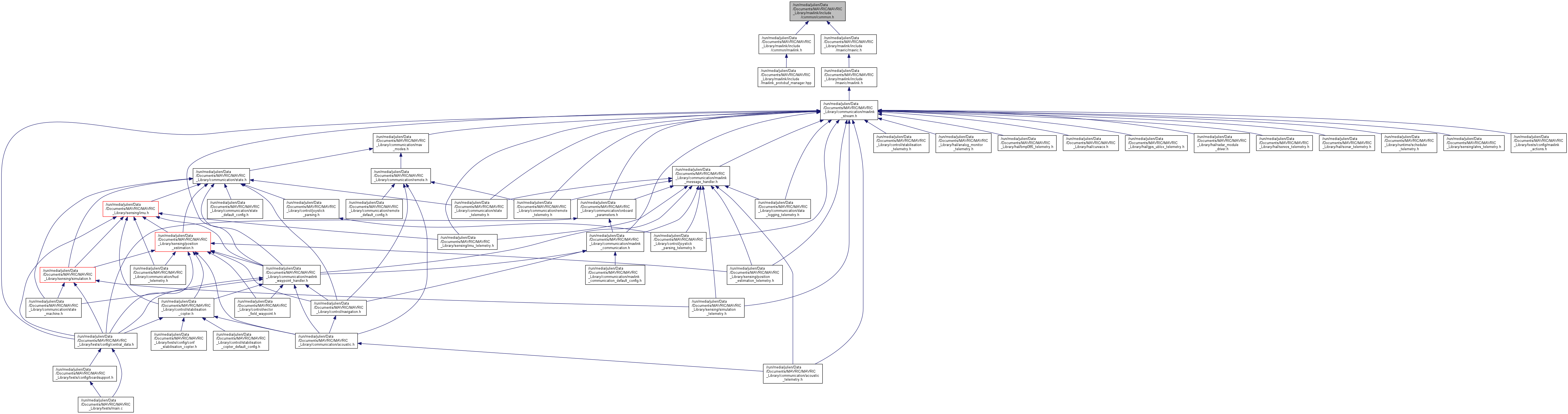
Go to the source code of this file.
Macros | |
| #define | MAVLINK_MESSAGE_LENGTHS {9, 31, 12, 0, 14, 28, 3, 32, 0, 0, 0, 6, 0, 0, 0, 0, 0, 0, 0, 0, 20, 2, 25, 23, 30, 101, 22, 26, 16, 14, 28, 32, 28, 28, 22, 22, 21, 6, 6, 37, 4, 4, 2, 2, 4, 2, 2, 3, 13, 12, 0, 0, 0, 0, 27, 25, 0, 0, 0, 0, 0, 68, 26, 185, 181, 42, 6, 4, 0, 11, 18, 0, 0, 37, 20, 35, 33, 3, 0, 0, 0, 22, 39, 37, 53, 51, 53, 51, 0, 28, 56, 42, 33, 0, 0, 0, 0, 0, 0, 0, 26, 32, 32, 20, 32, 62, 54, 64, 84, 9, 254, 0, 0, 36, 26, 64, 22, 6, 14, 12, 97, 2, 2, 113, 35, 6, 79, 35, 35, 0, 13, 255, 14, 18, 43, 8, 22, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 36, 20, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 254, 36, 30, 18, 18, 51, 9, 0} |
| #define | MAVLINK_MESSAGE_CRCS {50, 124, 137, 0, 237, 217, 104, 119, 0, 0, 0, 89, 0, 0, 0, 0, 0, 0, 0, 0, 214, 159, 220, 168, 24, 23, 170, 144, 67, 115, 39, 246, 185, 104, 237, 244, 222, 212, 9, 254, 230, 28, 28, 132, 221, 232, 11, 153, 41, 39, 0, 0, 0, 0, 15, 3, 0, 0, 0, 0, 0, 153, 183, 51, 82, 118, 148, 21, 0, 243, 124, 0, 0, 38, 20, 158, 152, 143, 0, 0, 0, 106, 49, 22, 143, 140, 5, 150, 0, 231, 183, 63, 54, 0, 0, 0, 0, 0, 0, 0, 175, 102, 158, 208, 56, 93, 211, 108, 32, 185, 23, 0, 0, 124, 119, 4, 76, 128, 56, 116, 134, 237, 203, 250, 87, 203, 220, 25, 226, 0, 29, 172, 85, 6, 229, 203, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 154, 49, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 48, 204, 49, 170, 44, 83, 46, 0} |
| #define | MAVLINK_MESSAGE_INFO {MAVLINK_MESSAGE_INFO_HEARTBEAT, MAVLINK_MESSAGE_INFO_SYS_STATUS, MAVLINK_MESSAGE_INFO_SYSTEM_TIME, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_PING, MAVLINK_MESSAGE_INFO_CHANGE_OPERATOR_CONTROL, MAVLINK_MESSAGE_INFO_CHANGE_OPERATOR_CONTROL_ACK, MAVLINK_MESSAGE_INFO_AUTH_KEY, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_SET_MODE, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_PARAM_REQUEST_READ, MAVLINK_MESSAGE_INFO_PARAM_REQUEST_LIST, MAVLINK_MESSAGE_INFO_PARAM_VALUE, MAVLINK_MESSAGE_INFO_PARAM_SET, MAVLINK_MESSAGE_INFO_GPS_RAW_INT, MAVLINK_MESSAGE_INFO_GPS_STATUS, MAVLINK_MESSAGE_INFO_SCALED_IMU, MAVLINK_MESSAGE_INFO_RAW_IMU, MAVLINK_MESSAGE_INFO_RAW_PRESSURE, MAVLINK_MESSAGE_INFO_SCALED_PRESSURE, MAVLINK_MESSAGE_INFO_ATTITUDE, MAVLINK_MESSAGE_INFO_ATTITUDE_QUATERNION, MAVLINK_MESSAGE_INFO_LOCAL_POSITION_NED, MAVLINK_MESSAGE_INFO_GLOBAL_POSITION_INT, MAVLINK_MESSAGE_INFO_RC_CHANNELS_SCALED, MAVLINK_MESSAGE_INFO_RC_CHANNELS_RAW, MAVLINK_MESSAGE_INFO_SERVO_OUTPUT_RAW, MAVLINK_MESSAGE_INFO_MISSION_REQUEST_PARTIAL_LIST, MAVLINK_MESSAGE_INFO_MISSION_WRITE_PARTIAL_LIST, MAVLINK_MESSAGE_INFO_MISSION_ITEM, MAVLINK_MESSAGE_INFO_MISSION_REQUEST, MAVLINK_MESSAGE_INFO_MISSION_SET_CURRENT, MAVLINK_MESSAGE_INFO_MISSION_CURRENT, MAVLINK_MESSAGE_INFO_MISSION_REQUEST_LIST, MAVLINK_MESSAGE_INFO_MISSION_COUNT, MAVLINK_MESSAGE_INFO_MISSION_CLEAR_ALL, MAVLINK_MESSAGE_INFO_MISSION_ITEM_REACHED, MAVLINK_MESSAGE_INFO_MISSION_ACK, MAVLINK_MESSAGE_INFO_SET_GPS_GLOBAL_ORIGIN, MAVLINK_MESSAGE_INFO_GPS_GLOBAL_ORIGIN, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_SAFETY_SET_ALLOWED_AREA, MAVLINK_MESSAGE_INFO_SAFETY_ALLOWED_AREA, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_ATTITUDE_QUATERNION_COV, MAVLINK_MESSAGE_INFO_NAV_CONTROLLER_OUTPUT, MAVLINK_MESSAGE_INFO_GLOBAL_POSITION_INT_COV, MAVLINK_MESSAGE_INFO_LOCAL_POSITION_NED_COV, MAVLINK_MESSAGE_INFO_RC_CHANNELS, MAVLINK_MESSAGE_INFO_REQUEST_DATA_STREAM, MAVLINK_MESSAGE_INFO_DATA_STREAM, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_MANUAL_CONTROL, MAVLINK_MESSAGE_INFO_RC_CHANNELS_OVERRIDE, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_MISSION_ITEM_INT, MAVLINK_MESSAGE_INFO_VFR_HUD, MAVLINK_MESSAGE_INFO_COMMAND_INT, MAVLINK_MESSAGE_INFO_COMMAND_LONG, MAVLINK_MESSAGE_INFO_COMMAND_ACK, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_MANUAL_SETPOINT, MAVLINK_MESSAGE_INFO_SET_ATTITUDE_TARGET, MAVLINK_MESSAGE_INFO_ATTITUDE_TARGET, MAVLINK_MESSAGE_INFO_SET_POSITION_TARGET_LOCAL_NED, MAVLINK_MESSAGE_INFO_POSITION_TARGET_LOCAL_NED, MAVLINK_MESSAGE_INFO_SET_POSITION_TARGET_GLOBAL_INT, MAVLINK_MESSAGE_INFO_POSITION_TARGET_GLOBAL_INT, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_LOCAL_POSITION_NED_SYSTEM_GLOBAL_OFFSET, MAVLINK_MESSAGE_INFO_HIL_STATE, MAVLINK_MESSAGE_INFO_HIL_CONTROLS, MAVLINK_MESSAGE_INFO_HIL_RC_INPUTS_RAW, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_OPTICAL_FLOW, MAVLINK_MESSAGE_INFO_GLOBAL_VISION_POSITION_ESTIMATE, MAVLINK_MESSAGE_INFO_VISION_POSITION_ESTIMATE, MAVLINK_MESSAGE_INFO_VISION_SPEED_ESTIMATE, MAVLINK_MESSAGE_INFO_VICON_POSITION_ESTIMATE, MAVLINK_MESSAGE_INFO_HIGHRES_IMU, MAVLINK_MESSAGE_INFO_OMNIDIRECTIONAL_FLOW, MAVLINK_MESSAGE_INFO_HIL_SENSOR, MAVLINK_MESSAGE_INFO_SIM_STATE, MAVLINK_MESSAGE_INFO_RADIO_STATUS, MAVLINK_MESSAGE_INFO_FILE_TRANSFER_PROTOCOL, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_HIL_GPS, MAVLINK_MESSAGE_INFO_HIL_OPTICAL_FLOW, MAVLINK_MESSAGE_INFO_HIL_STATE_QUATERNION, MAVLINK_MESSAGE_INFO_SCALED_IMU2, MAVLINK_MESSAGE_INFO_LOG_REQUEST_LIST, MAVLINK_MESSAGE_INFO_LOG_ENTRY, MAVLINK_MESSAGE_INFO_LOG_REQUEST_DATA, MAVLINK_MESSAGE_INFO_LOG_DATA, MAVLINK_MESSAGE_INFO_LOG_ERASE, MAVLINK_MESSAGE_INFO_LOG_REQUEST_END, MAVLINK_MESSAGE_INFO_GPS_INJECT_DATA, MAVLINK_MESSAGE_INFO_GPS2_RAW, MAVLINK_MESSAGE_INFO_POWER_STATUS, MAVLINK_MESSAGE_INFO_SERIAL_CONTROL, MAVLINK_MESSAGE_INFO_GPS_RTK, MAVLINK_MESSAGE_INFO_GPS2_RTK, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_DATA_TRANSMISSION_HANDSHAKE, MAVLINK_MESSAGE_INFO_ENCAPSULATED_DATA, MAVLINK_MESSAGE_INFO_DISTANCE_SENSOR, MAVLINK_MESSAGE_INFO_TERRAIN_REQUEST, MAVLINK_MESSAGE_INFO_TERRAIN_DATA, MAVLINK_MESSAGE_INFO_TERRAIN_CHECK, MAVLINK_MESSAGE_INFO_TERRAIN_REPORT, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_BATTERY_STATUS, MAVLINK_MESSAGE_INFO_AUTOPILOT_VERSION, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}, MAVLINK_MESSAGE_INFO_V2_EXTENSION, MAVLINK_MESSAGE_INFO_MEMORY_VECT, MAVLINK_MESSAGE_INFO_DEBUG_VECT, MAVLINK_MESSAGE_INFO_NAMED_VALUE_FLOAT, MAVLINK_MESSAGE_INFO_NAMED_VALUE_INT, MAVLINK_MESSAGE_INFO_STATUSTEXT, MAVLINK_MESSAGE_INFO_DEBUG, {"EMPTY",0,{{"","",MAVLINK_TYPE_CHAR,0,0,0}}}} |
| #define | MAVLINK_ENABLED_COMMON |
| #define | HAVE_ENUM_MAV_AUTOPILOT |
| Micro air vehicle / autopilot classes. This identifies the individual model. | |
| #define | HAVE_ENUM_MAV_TYPE |
| #define | HAVE_ENUM_MAV_MODE_FLAG |
| These flags encode the MAV mode. | |
| #define | HAVE_ENUM_MAV_MODE_FLAG_DECODE_POSITION |
| These values encode the bit positions of the decode position. These values can be used to read the value of a flag bit by combining the base_mode variable with AND with the flag position value. The result will be either 0 or 1, depending on if the flag is set or not. | |
| #define | HAVE_ENUM_MAV_GOTO |
| Override command, pauses current mission execution and moves immediately to a position. | |
| #define | HAVE_ENUM_MAV_MODE |
| These defines are predefined OR-combined mode flags. There is no need to use values from this enum, but it simplifies the use of the mode flags. Note that manual input is enabled in all modes as a safety override. | |
| #define | HAVE_ENUM_MAV_STATE |
| #define | HAVE_ENUM_MAV_COMPONENT |
| #define | HAVE_ENUM_MAV_SYS_STATUS_SENSOR |
| These encode the sensors whose status is sent as part of the SYS_STATUS message. | |
| #define | HAVE_ENUM_MAV_FRAME |
| #define | HAVE_ENUM_MAVLINK_DATA_STREAM_TYPE |
| #define | HAVE_ENUM_FENCE_ACTION |
| #define | HAVE_ENUM_FENCE_BREACH |
| #define | HAVE_ENUM_MAV_MOUNT_MODE |
| Enumeration of possible mount operation modes. | |
| #define | HAVE_ENUM_MAV_CMD |
| Commands to be executed by the MAV. They can be executed on user request, or as part of a mission script. If the action is used in a mission, the parameter mapping to the waypoint/mission message is as follows: Param 1, Param 2, Param 3, Param 4, X: Param 5, Y:Param 6, Z:Param 7. This command list is similar what ARINC 424 is for commercial aircraft: A data format how to interpret waypoint/mission data. | |
| #define | HAVE_ENUM_MAV_DATA_STREAM |
| Data stream IDs. A data stream is not a fixed set of messages, but rather a recommendation to the autopilot software. Individual autopilots may or may not obey the recommended messages. | |
| #define | HAVE_ENUM_MAV_ROI |
| The ROI (region of interest) for the vehicle. This can be be used by the vehicle for camera/vehicle attitude alignment (see MAV_CMD_NAV_ROI). | |
| #define | HAVE_ENUM_MAV_CMD_ACK |
| ACK / NACK / ERROR values as a result of MAV_CMDs and for mission item transmission. | |
| #define | HAVE_ENUM_MAV_PARAM_TYPE |
| Specifies the datatype of a MAVLink parameter. | |
| #define | HAVE_ENUM_MAV_RESULT |
| result from a mavlink command | |
| #define | HAVE_ENUM_MAV_MISSION_RESULT |
| result in a mavlink mission ack | |
| #define | HAVE_ENUM_MAV_SEVERITY |
| Indicates the severity level, generally used for status messages to indicate their relative urgency. Based on RFC-5424 using expanded definitions at: http://www.kiwisyslog.com/kb/info:-syslog-message-levels/. | |
| #define | HAVE_ENUM_MAV_POWER_STATUS |
| Power supply status flags (bitmask) | |
| #define | HAVE_ENUM_SERIAL_CONTROL_DEV |
| SERIAL_CONTROL device types. | |
| #define | HAVE_ENUM_SERIAL_CONTROL_FLAG |
| SERIAL_CONTROL flags (bitmask) | |
| #define | HAVE_ENUM_MAV_DISTANCE_SENSOR |
| Enumeration of distance sensor types. | |
| #define | HAVE_ENUM_MAV_PROTOCOL_CAPABILITY |
| Bitmask of (optional) autopilot capabilities (64 bit). If a bit is set, the autopilot supports this capability. | |
| #define | HAVE_ENUM_MAV_ESTIMATOR_TYPE |
| Enumeration of estimator types. | |
| #define | HAVE_ENUM_MAV_BATTERY_TYPE |
| Enumeration of battery types. | |
| #define | HAVE_ENUM_MAV_BATTERY_FUNCTION |
| Enumeration of battery functions. | |
| #define | MAVLINK_VERSION 3 |
MAVLink comm protocol generated from common.xml.
 1.8.9.1
1.8.9.1

