|
MAV'RIC
|
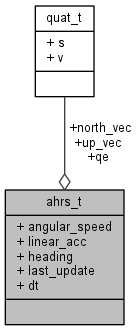
Structure containing the Attitude and Heading Reference System. More...
#include <ahrs.h>
Public Attributes | |
| quat_t | qe |
| quaternion defining the Attitude estimation of the platform | |
| float | angular_speed [3] |
| Gyro rates. | |
| float | linear_acc [3] |
| Acceleration WITHOUT gravity. | |
| float | heading |
| The heading of the platform. | |
| quat_t | up_vec |
| The quaternion of the up vector. | |
| quat_t | north_vec |
| The quaternion of the north vector. | |
| uint32_t | last_update |
| The time of the last IMU update in ms. | |
| float | dt |
| The time interval between two IMU updates. | |
Structure containing the Attitude and Heading Reference System.
 1.8.9.1
1.8.9.1

