|
MAV'RIC
|
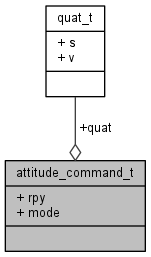
Attitude command structure. More...
#include <control_command.h>
Public Attributes | |
| quat_t | quat |
| Attitude quaternion. | |
| float | rpy [3] |
| Roll, pitch and yaw angles. | |
| attitude_command_mode_t | mode |
| Command mode, defines whether the quaternion or the rpy angles should be used. | |
Attitude command structure.
 1.8.9.1
1.8.9.1

