|
MAV'RIC
|
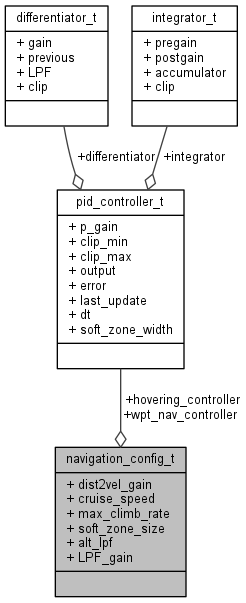
Public Attributes | |
| float | dist2vel_gain |
| The gain linking the distance to the goal to the actual speed. | |
| float | cruise_speed |
| The cruise speed in m/s. | |
| float | max_climb_rate |
| Max climb rate in m/s. | |
| float | soft_zone_size |
| Soft zone of the velocity controller. | |
| float | alt_lpf |
| The low-pass filtered altitude for auto-landing. | |
| float | LPF_gain |
| The value of the low-pass filter gain. | |
| pid_controller_t | hovering_controller |
| hovering controller | |
| pid_controller_t | wpt_nav_controller |
| waypoint navigation controller | |
 1.8.9.1
1.8.9.1

