|
MAV'RIC
|
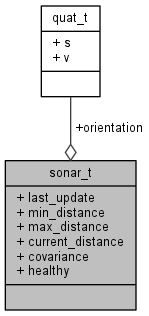
Sonar structure, independent of the sensor used. More...
#include <sonar.h>
Public Attributes | |
| uint32_t | last_update |
| Time since system boot. | |
| quat_t | orientation |
| Direction the sensor faces from FIXME enum. | |
| float | min_distance |
| Minimum distance the sensor can measure in centimeters. | |
| float | max_distance |
| Maximum distance the sensor can measure in centimeters. | |
| float | current_distance |
| Measured distance in meters. | |
| float | covariance |
| Measurement covariance in centimeters, 0 for unknown / invalid readings. | |
| bool | healthy |
| Indicates whether the current measurement can be trusted. | |
Sonar structure, independent of the sensor used.
 1.8.9.1
1.8.9.1

