|
MAV'RIC
|
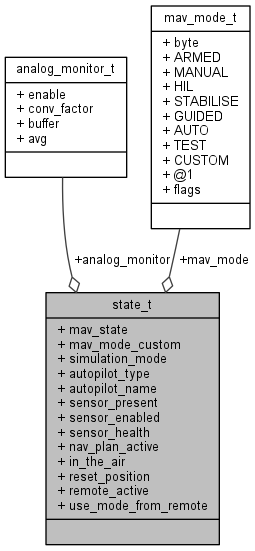
The state structure. More...
#include <state.h>
Public Attributes | |
| mav_mode_t | mav_mode |
| The value of the MAV mode. | |
| mav_state_t | mav_state |
| The value of the MAV state. | |
| mav_mode_custom_t | mav_mode_custom |
| The value of the custom_mode. | |
| int32_t | simulation_mode |
| The value of the simulation_mode (0: real, 1: simulation) | |
| uint8_t | autopilot_type |
| The type of the autopilot (MAV_TYPE enum in common.h) | |
| uint8_t | autopilot_name |
| The name of the autopilot (MAV_AUTOPILOT enum in common.h) | |
| uint16_t | sensor_present |
| The type of sensors that are present on the autopilot (Value of 0: not present. Value of 1: present. Indices: 0: 3D gyro, 1: 3D acc, 2: 3D mag, 3: absolute pressure, 4: differential pressure, 5: GPS, 6: optical flow, 7: computer vision position, 8: laser based position, 9: external ground-truth (Vicon or Leica). Controllers: 10: 3D angular rate control 11: attitude stabilization, 12: yaw position, 13: z/altitude control, 14: x/y position control, 15: motor outputs / control) | |
| uint16_t | sensor_enabled |
| The sensors enabled on the autopilot (Value of 0: not enabled. Value of 1: enabled. Indices: 0: 3D gyro, 1: 3D acc, 2: 3D mag, 3: absolute pressure, 4: differential pressure, 5: GPS, 6: optical flow, 7: computer vision position, 8: laser based position, 9: external ground-truth (Vicon or Leica). Controllers: 10: 3D angular rate control 11: attitude stabilization, 12: yaw position, 13: z/altitude control, 14: x/y position control, 15: motor outputs / control) | |
| uint16_t | sensor_health |
| The health of sensors present on the autopilot (Value of 0: not enabled. Value of 1: enabled. Indices: 0: 3D gyro, 1: 3D acc, 2: 3D mag, 3: absolute pressure, 4: differential pressure, 5: GPS, 6: optical flow, 7: computer vision position, 8: laser based position, 9: external ground-truth (Vicon or Leica). Controllers: 10: 3D angular rate control 11: attitude stabilization, 12: yaw position, 13: z/altitude control, 14: x/y position control, 15: motor outputs / control) | |
| bool | nav_plan_active |
| Flag to tell that a flight plan (min 1 waypoint) is active. | |
| bool | in_the_air |
| Flag to tell whether the vehicle is airborne or not. | |
| bool | reset_position |
| Flag to enable the reset of the position estimation. | |
| uint32_t | remote_active |
| Flag to tell whether the remote is active or not. | |
| uint32_t | use_mode_from_remote |
| Flag to tell whether the modes are coming from the remote or not. | |
| const analog_monitor_t * | analog_monitor |
| The pointer to the analog monitor structure. | |
The state structure.
 1.8.9.1
1.8.9.1

