|
MAV'RIC
|
|
MAV'RIC
|
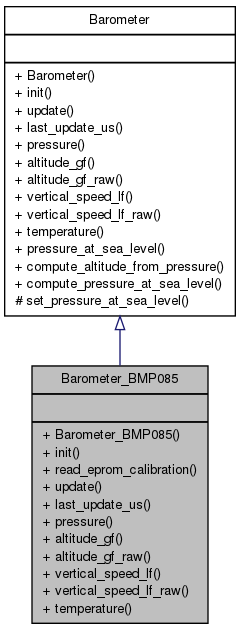
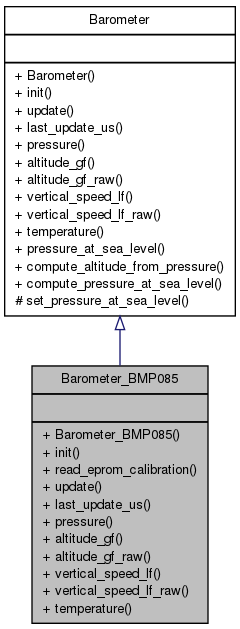
Driver for the BMP085 barometer. More...
#include <barometer_bmp085.hpp>
Public Member Functions | |
| Barometer_BMP085 (I2c &i2c) | |
| Constructor. | |
| bool | init (void) |
| Initialise the sensor. | |
| bool | read_eprom_calibration (void) |
| Read calibration data from EPROM. | |
| bool | update (void) |
| Main update function Reads new values from sensor. | |
| uint64_t | last_update_us (void) const |
| Get the last update time in microseconds. | |
| float | pressure (void) const |
| Return the pressure (in Pa) | |
| float | altitude_gf (void) const |
| Get the altitude in meters above sea level. | |
| float | altitude_gf_raw (void) const |
| Get the altitude in meters above sea level (not filtered) | |
| float | vertical_speed_lf (void) const |
| Get the vertical speed in meters/second. | |
| float | vertical_speed_lf_raw (void) const |
| Get the vertical speed in meters/second (not filtered) | |
| float | temperature (void) const |
| Get sensor temperature. | |
Driver for the BMP085 barometer.
| Barometer_BMP085::Barometer_BMP085 | ( | I2c & | i2c | ) |
Constructor.
| i2c | Reference to I2C device |
| float Barometer_BMP085::altitude_gf | ( | void | ) | const [virtual] |
Get the altitude in meters above sea level.
Global frame: (>0 means upward)
Implements Barometer.
| float Barometer_BMP085::altitude_gf_raw | ( | void | ) | const [virtual] |
Get the altitude in meters above sea level (not filtered)
Global frame: (>0 means upward)
Implements Barometer.
| bool Barometer_BMP085::init | ( | void | ) | [virtual] |
Initialise the sensor.
Implements Barometer.


| uint64_t Barometer_BMP085::last_update_us | ( | void | ) | const [virtual] |
| float Barometer_BMP085::pressure | ( | void | ) | const [virtual] |
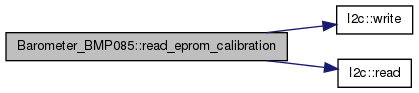
| bool Barometer_BMP085::read_eprom_calibration | ( | void | ) |
Read calibration data from EPROM.

| float Barometer_BMP085::temperature | ( | void | ) | const [virtual] |
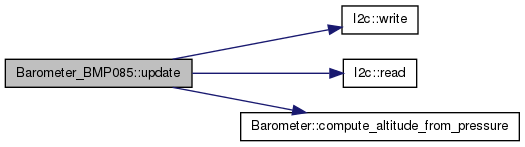
| bool Barometer_BMP085::update | ( | void | ) | [virtual] |
Main update function Reads new values from sensor.
< step 1
< do pressure calcs
Implements Barometer.
| float Barometer_BMP085::vertical_speed_lf | ( | void | ) | const [virtual] |
Get the vertical speed in meters/second.
NED frame: (>0 means downward)
Implements Barometer.
| float Barometer_BMP085::vertical_speed_lf_raw | ( | void | ) | const [virtual] |
Get the vertical speed in meters/second (not filtered)
NED frame: (>0 means downward)
Implements Barometer.
 1.7.6.1
1.7.6.1

