|
MAV'RIC
|
|
MAV'RIC
|
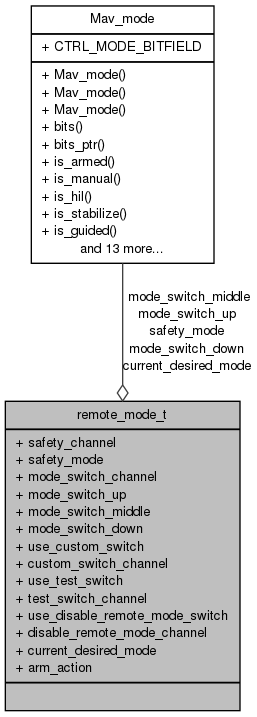
The structure of the remote mode. More...
#include <remote.hpp>
Public Attributes | |
| remote_channel_t | safety_channel |
| Channel to use as 2-way "safety" switch. When 100%: safety mode, When -100%: normal mode (defined by mode_switch_channel) | |
| Mav_mode | safety_mode |
| Mode when the safety channel is at 100% (ARMED and HIL bit flags are ignored) | |
| remote_channel_t | mode_switch_channel |
| Channel to use as 3-way mode switch. The 3 corresponding modes are used when the safety channel is at -100%. | |
| Mav_mode | mode_switch_up |
| Mode when the mode switch is UP (ARMED and HIL bit flags are ignored) | |
| Mav_mode | mode_switch_middle |
| Mode when the mode switch is MIDDLE (ARMED and HIL bit flags are ignored) | |
| Mav_mode | mode_switch_down |
| Mode when the mode switch is DOWN (ARMED and HIL bit flags are ignored) | |
| bool | use_custom_switch |
| Indicates whether a switch to activate the custom flag should be used. | |
| remote_channel_t | custom_switch_channel |
| Channel to use as 2-way custom switch. If not in safety, the switch overrides the custom bit flag: 0 when switch is -100%, 1 when switch is 100%. | |
| bool | use_test_switch |
| Indicates whether a switch to activate the test flag should be used. | |
| remote_channel_t | test_switch_channel |
| Channel to use as 2-way test switch. If not in safety, the switch overrides the test bit flag: 0 when switch is -100%, 1 when switch is 100%. | |
| bool | use_disable_remote_mode_switch |
| Indicates whether a switch should be used to use/override the mode indicated by the remote. | |
| remote_channel_t | disable_remote_mode_channel |
| Channel to use as 2-way switch. When 100%: follow mode indicated by the remote, when -100%: override what the remote indicates. | |
| Mav_mode | current_desired_mode |
| Mav mode indicated by the remote. | |
| arm_action_t | arm_action |
The structure of the remote mode.
 1.7.6.1
1.7.6.1

