|
MAV'RIC
|
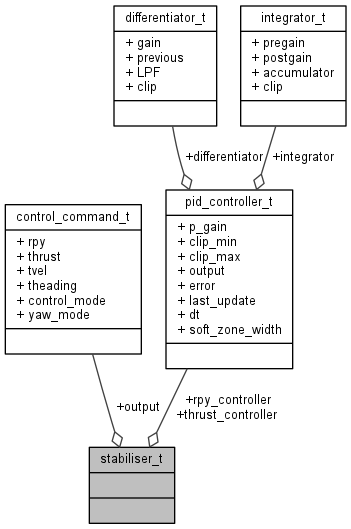
The structure used to control the vehicle with 4 PIDs. More...
#include <stabilisation.h>
Public Attributes | |
| pid_controller_t | rpy_controller [3] |
| roll pitch yaw controllers | |
| pid_controller_t | thrust_controller |
| thrust controller | |
| control_command_t | output |
| output | |
The structure used to control the vehicle with 4 PIDs.
 1.8.9.1
1.8.9.1

