Classes |
| struct | conf_t |
| | The structure for configuring the quaternion-based attitude estimation. More...
|
Public Member Functions |
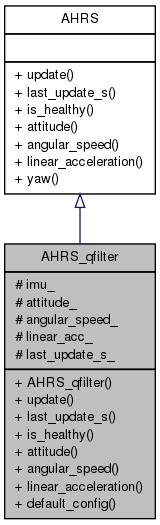
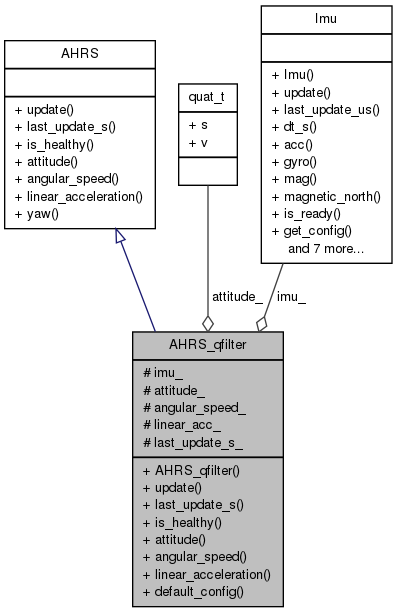
| | AHRS_qfilter (const Imu &imu, const conf_t &config=default_config()) |
| | Constructor.
|
|
bool | update (void) |
| | Performs the attitude estimation via a complementary filter.
|
| float | last_update_s (void) const |
| | Last update in seconds.
|
| bool | is_healthy (void) const |
| | Indicates which estimate can be trusted.
|
| quat_t | attitude (void) const |
| | Estimated attitude.
|
| std::array< float, 3 > | angular_speed (void) const |
| | Estimated angular velocity.
|
| std::array< float, 3 > | linear_acceleration (void) const |
| | Estimated linear acceleration.
|
Static Public Member Functions |
|
static conf_t | default_config () |
Protected Attributes |
|
const Imu & | imu_ |
| | Pointer to inertial sensors readout.
|
|
quat_t | attitude_ |
| | Estimated attitude.
|
|
std::array< float, 3 > | angular_speed_ |
| | Estimated angular speed.
|
|
std::array< float, 3 > | linear_acc_ |
| | Estimated linear acceleration.
|
|
float | last_update_s_ |
| | Last update time.
|
The structure for the quaternion-based attitude estimation.
 1.7.6.1
1.7.6.1

