|
MAV'RIC
|
|
MAV'RIC
|
Abstract class for simulation's dynamic model. More...
#include <dynamic_model.hpp>
Public Member Functions | |
| virtual bool | update (void)=0 |
| Main update function Reads new values from sensor. | |
| virtual const float & | last_update_us (void) const =0 |
| Get last update time in microseconds. | |
| virtual const std::array < float, 3 > & | acceleration_bf (void) const =0 |
| Get X, Y and Z components of acceleration in body frame in m/s^2. | |
| virtual const std::array < float, 3 > & | velocity_lf (void) const =0 |
| Get X, Y and Z components of velocity in local frame. | |
| virtual const std::array < float, 3 > & | position_lf (void) const =0 |
| Get X, Y and Z position in local frame (centered on home) | |
| virtual const global_position_t & | position_gf (void) const =0 |
| Get X, Y and Z position in global frame. | |
| virtual const std::array < float, 3 > & | angular_velocity_bf (void) const =0 |
| Get X, Y and Z components of angular velocity in body frame. | |
| virtual const quat_t & | attitude (void) const =0 |
| Get attitude quaternion. | |
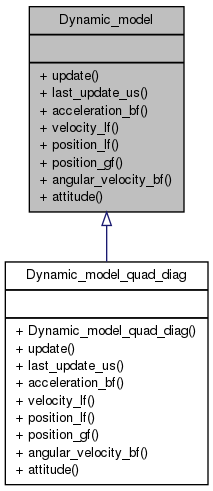
Abstract class for simulation's dynamic model.
| virtual const std::array<float, 3>& Dynamic_model::acceleration_bf | ( | void | ) | const [pure virtual] |
Get X, Y and Z components of acceleration in body frame in m/s^2.
Implemented in Dynamic_model_quad_diag.

| virtual const std::array<float, 3>& Dynamic_model::angular_velocity_bf | ( | void | ) | const [pure virtual] |
Get X, Y and Z components of angular velocity in body frame.
Implemented in Dynamic_model_quad_diag.

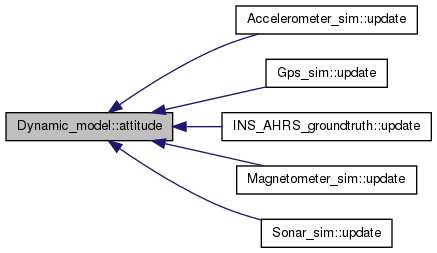
| virtual const quat_t& Dynamic_model::attitude | ( | void | ) | const [pure virtual] |
Get attitude quaternion.
Implemented in Dynamic_model_quad_diag.
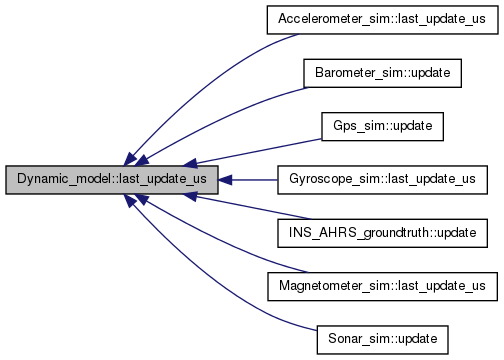
| virtual const float& Dynamic_model::last_update_us | ( | void | ) | const [pure virtual] |
Get last update time in microseconds.
Implemented in Dynamic_model_quad_diag.
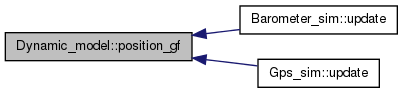
| virtual const global_position_t& Dynamic_model::position_gf | ( | void | ) | const [pure virtual] |
Get X, Y and Z position in global frame.
Implemented in Dynamic_model_quad_diag.
| virtual const std::array<float, 3>& Dynamic_model::position_lf | ( | void | ) | const [pure virtual] |
Get X, Y and Z position in local frame (centered on home)
Implemented in Dynamic_model_quad_diag.
| virtual bool Dynamic_model::update | ( | void | ) | [pure virtual] |
Main update function Reads new values from sensor.
Implemented in Dynamic_model_quad_diag.
| virtual const std::array<float, 3>& Dynamic_model::velocity_lf | ( | void | ) | const [pure virtual] |
Get X, Y and Z components of velocity in local frame.
Implemented in Dynamic_model_quad_diag.
 1.7.6.1
1.7.6.1

