|
MAV'RIC
|
|
MAV'RIC
|
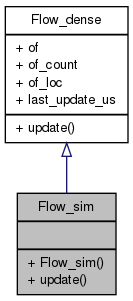
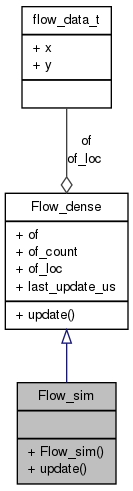
Interface for Optic Flow sensors. More...
#include <flow_sim.hpp>
Public Member Functions | |
| Flow_sim (Dynamic_model &dynamic_model_, raytracing::World &world, float orientation_azimuth=0.0f) | |
| bool | update (void) |
Interface for Optic Flow sensors.
 1.7.6.1
1.7.6.1

