List of all members.
Public Member Functions |
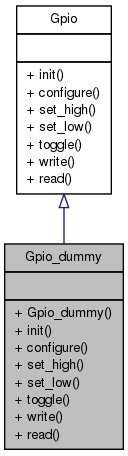
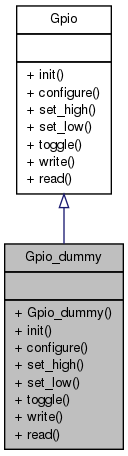
| | Gpio_dummy (gpio_dummy_conf_t config=gpio_dummy_default_config()) |
| | Initialises the peripheral.
|
| bool | init (void) |
| | Hardware initialization.
|
| bool | configure (gpio_dir_t dir, gpio_pull_updown_t pull) |
| | Configures the GPIO.
|
| bool | set_high (void) |
| | Write 1 to the gpio.
|
| bool | set_low (void) |
| | Write 0 to the gpio.
|
| bool | toggle (void) |
| | Toggle the gpio value.
|
| bool | write (bool level) |
| | Write to the gpio pin.
|
| bool | read (void) |
| | Read the current gpio level.
|
Constructor & Destructor Documentation
Initialises the peripheral.
- Parameters:
-
| config | Device configuration |
Member Function Documentation
Configures the GPIO.
- Parameters:
-
| dir | Pin direction (one of enum gpio_dir_t) |
| pull | Pin pull up/down (one of enum gpio_pull_updown_t) |
- Returns:
- success
Implements Gpio.
Hardware initialization.
- Returns:
- true Success
-
false Error
Implements Gpio.
Read the current gpio level.
- Returns:
- Level
Implements Gpio.
Write 1 to the gpio.
- Returns:
- true Success
-
false Failed
Implements Gpio.
Write 0 to the gpio.
- Returns:
- true Success
-
false Failed
Implements Gpio.
Toggle the gpio value.
Writes 0 if currently high, writes 1 if currently low
- Returns:
- true Success
-
false Failed
Implements Gpio.
Write to the gpio pin.
- Parameters:
-
- Returns:
- true Success
-
false Failed
Implements Gpio.
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/hal/dummy/gpio_dummy.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/hal/dummy/gpio_dummy.cpp

 1.7.6.1
1.7.6.1

