Hub for GPS redundancy.
More...
#include <gps_hub.hpp>
List of all members.
Public Member Functions |
|
| static_assert (N >=1,"Need at least one GPS") |
|
| Gps_hub (std::array< Gps *, N > gps_list) |
| | Constructor.
|
| bool | update (void) |
| | Main update function Reads new values from sensor.
|
| bool | init (void) |
| | Initializes the gps.
|
|
void | configure (void) |
| | (re)Configure the GPS
|
| float | last_update_us (void) const |
| | Get last update time in microseconds.
|
| float | last_position_update_us (void) const |
| | Get last position update time in microseconds.
|
| float | last_velocity_update_us (void) const |
| | Get last velocity update time in microseconds.
|
| global_position_t | position_gf (void) const |
| | Get position in global frame.
|
| float | horizontal_position_accuracy (void) const |
| | Get horizontal position accuracy in m.
|
| float | vertical_position_accuracy (void) const |
| | Get vertical position accuracy in m.
|
| std::array< float, 3 > | velocity_lf (void) const |
| | Get velocity in local frame in m/s.
|
| float | velocity_accuracy (void) const |
| | Get velocity accuracy in m/s.
|
| float | heading (void) const |
| | Get heading in degrees.
|
| float | heading_accuracy (void) const |
| | Get heading accuracy in degrees.
|
| uint8_t | num_sats (void) const |
| | Get the number of satellites.
|
| gps_fix_t | fix (void) const |
| | Indicates whether fix are received.
|
| bool | healthy (void) const |
| | Indicates whether the measurements can be trusted.
|
Protected Attributes |
|
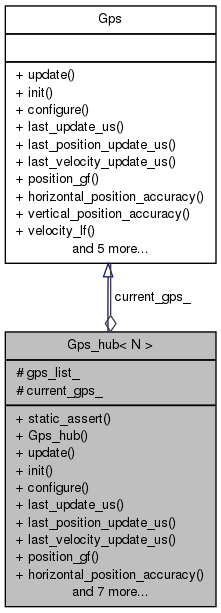
std::array< Gps *, N > | gps_list_ |
|
Gps * | current_gps_ |
Detailed Description
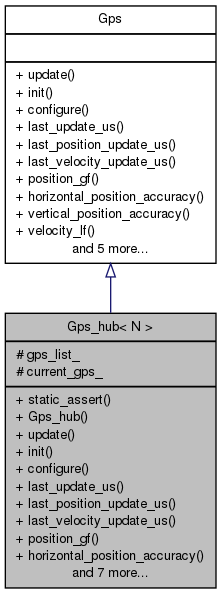
template<uint32_t N>
class Gps_hub< N >
Hub for GPS redundancy.
- Template Parameters:
-
| N | Number of GPS connected to hub |
Member Function Documentation
template<uint32_t N>
| gps_fix_t Gps_hub< N >::fix |
( |
void |
| ) |
const [inline, virtual] |
Indicates whether fix are received.
- Returns:
- Value
Implements Gps.
Get heading in degrees.
- Returns:
- heading
Implements Gps.
Get heading accuracy in degrees.
- Returns:
- accuracy
Implements Gps.
Indicates whether the measurements can be trusted.
- Returns:
- Value
Implements Gps.
Get horizontal position accuracy in m.
- Returns:
- accuracy
Implements Gps.
Initializes the gps.
- Returns:
- Success
Implements Gps.
Get last position update time in microseconds.
- Returns:
- Update time
Implements Gps.
Get last update time in microseconds.
- Returns:
- Update time
Implements Gps.
Get last velocity update time in microseconds.
- Returns:
- Update time
Implements Gps.
Get the number of satellites.
- Returns:
- Value
Implements Gps.
Get position in global frame.
- Returns:
- position
Implements Gps.
Main update function Reads new values from sensor.
- Returns:
- Success
Implements Gps.
Get velocity accuracy in m/s.
- Returns:
- velocity accuracy
Implements Gps.
Get velocity in local frame in m/s.
- Returns:
- 3D velocity
Implements Gps.
Get vertical position accuracy in m.
- Returns:
- accuracy
Implements Gps.
The documentation for this class was generated from the following file:
- /home/travis/build/lis-epfl/MAVRIC_Library/drivers/gps_hub.hpp



 1.7.6.1
1.7.6.1

