|
MAV'RIC
|
|
MAV'RIC
|
Public Member Functions | |
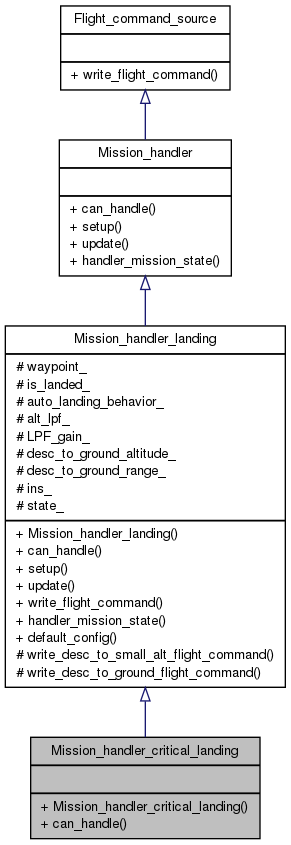
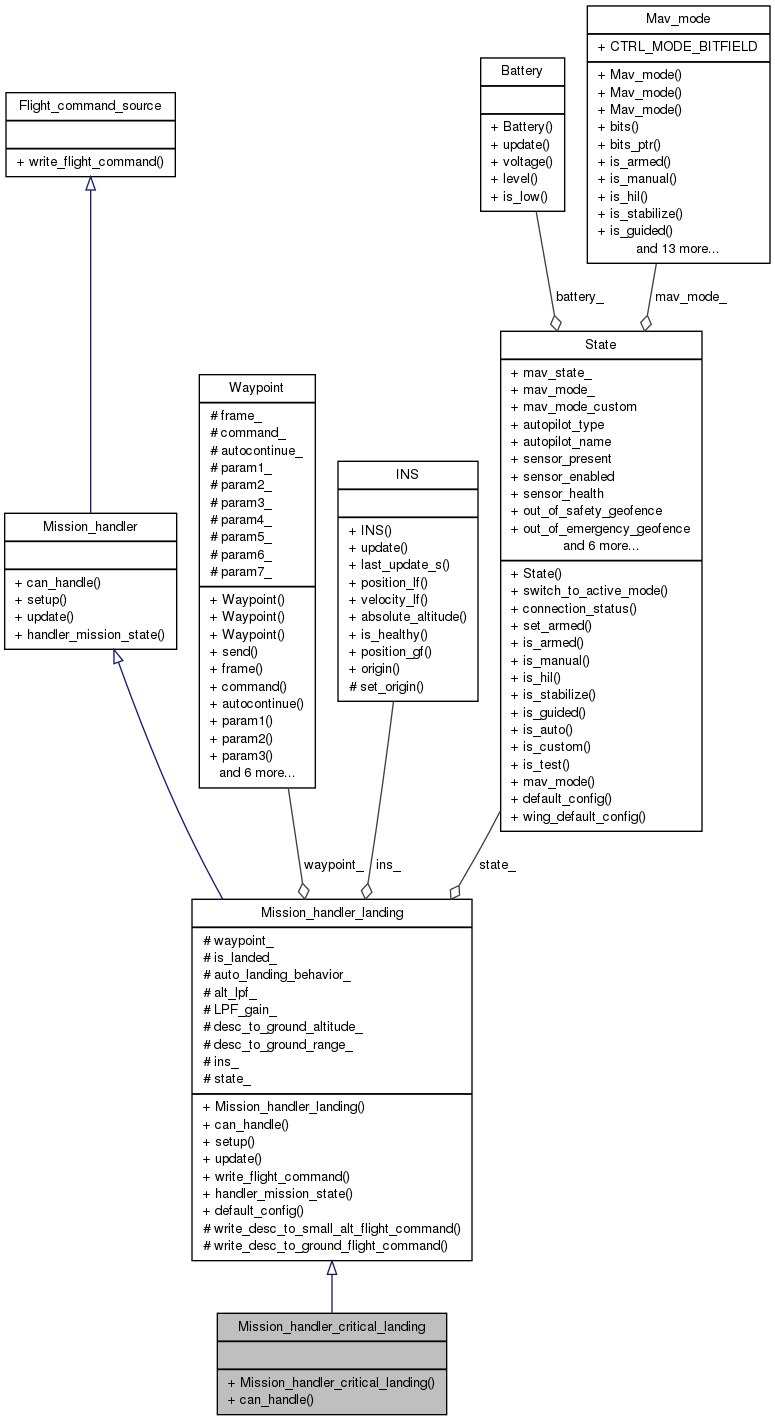
| Mission_handler_critical_landing (const INS &ins, State &state) | |
| Initialize the landing mission planner handler. | |
| virtual bool | can_handle (const Waypoint &wpt) const |
| Checks if the waypoint is a landing waypoint. | |
| Mission_handler_critical_landing::Mission_handler_critical_landing | ( | const INS & | ins, |
| State & | state | ||
| ) |
Initialize the landing mission planner handler.
| ins | The reference to the ins |
| state | The reference to the state structure |
| bool Mission_handler_critical_landing::can_handle | ( | const Waypoint & | wpt | ) | const [virtual] |
Checks if the waypoint is a landing waypoint.
Checks if the inputted waypoint is a: MAV_CMD_NAV_CRITICAL_LAND
| wpt | The waypoint class |
Reimplemented from Mission_handler_landing.

 1.7.6.1
1.7.6.1

