List of all members.
Constructor & Destructor Documentation
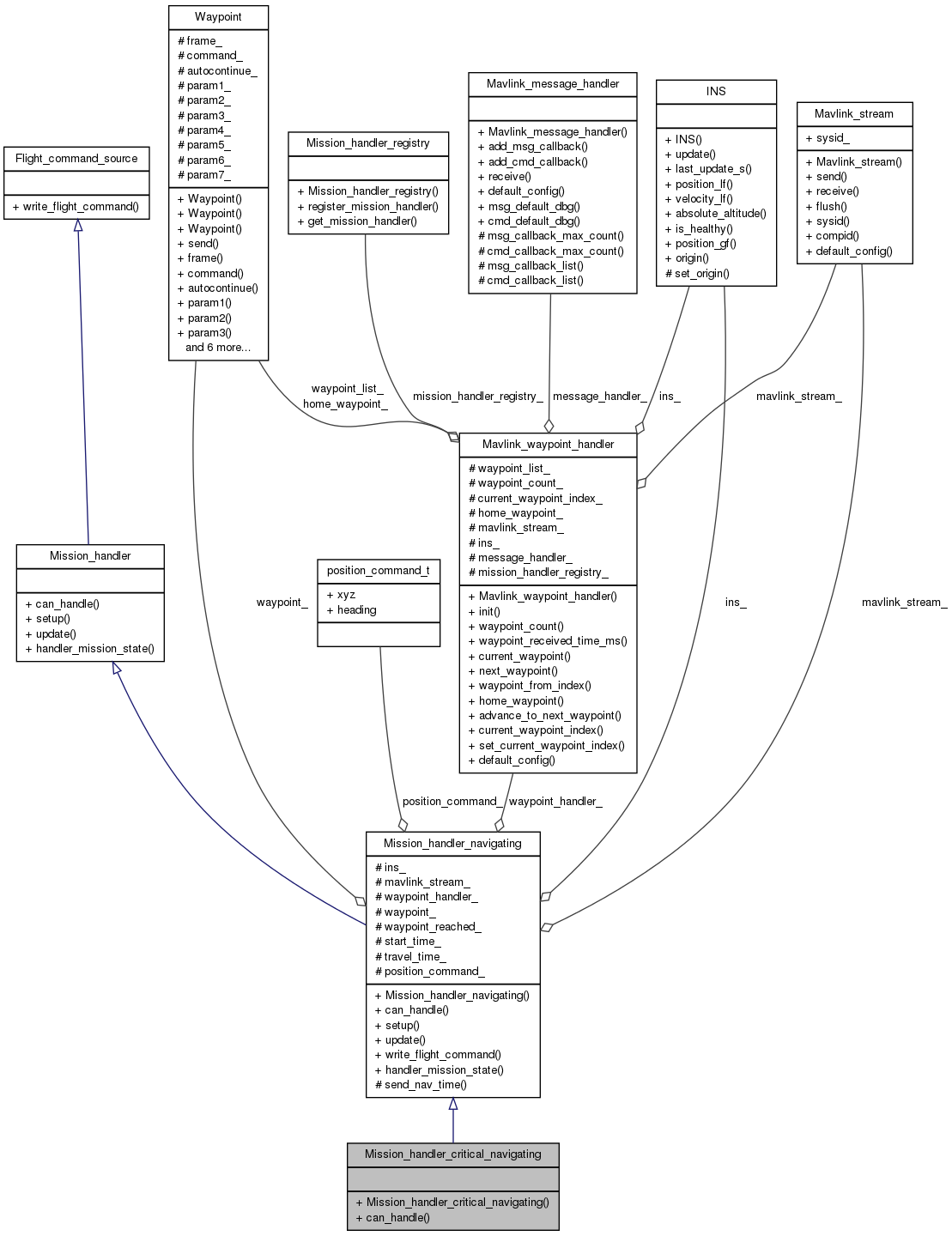
Initialize the navigating mission planner handler.
- Parameters:
-
| ins | The reference to the ins |
| mission_planner | The reference to the mission planner |
| mavlink_stream | The reference to the MAVLink stream structure |
| waypoint_handler | The handler for the manual control state |
Member Function Documentation
Checks if the waypoint is a navigating waypoint.
Checks if the inputted waypoint is a: MAV_CMD_NAV_CRITICAL_WAYPOINT
- Parameters:
-
- Returns:
- Can handle
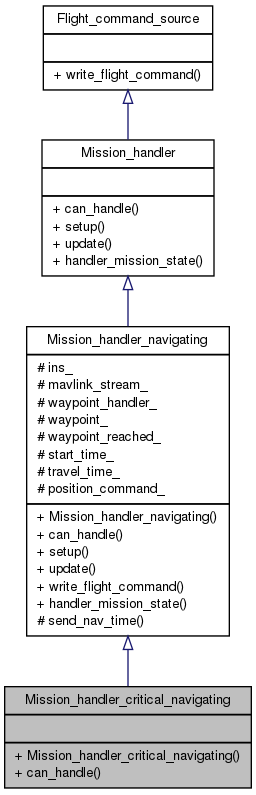
Reimplemented from Mission_handler_navigating.
The documentation for this class was generated from the following files:

 1.7.6.1
1.7.6.1

