List of all members.
Member Function Documentation
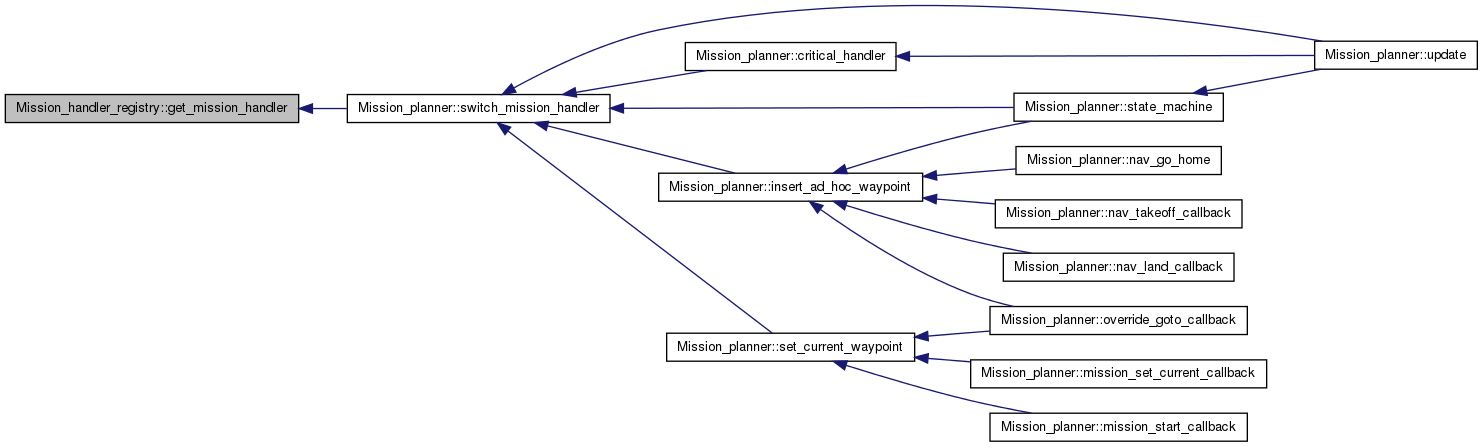
Attempts to get the mission handler form the registry.
If there is a mission handler that can take the waypoint, then the registry will return the first mission handler that can take it. If no mission handler can take the waypoint, then the mission handler will return NULL.
- Parameters:
-
| waypoint | The waypoint to be handled |
- Returns:
- The first acceptable mission handler or NULL
Registers the inputted handler to the array of known mission handlers. Performs a check to see if that object is already within the array.
- Parameters:
-
| handler | The new mission handler |
- Returns:
- Success
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/mission/mission_handler_registry.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/mission/mission_handler_registry.cpp
 1.7.6.1
1.7.6.1

