|
MAV'RIC
|
|
MAV'RIC
|
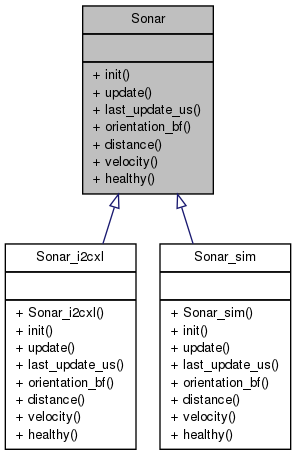
Abstarct class for sonars. More...
#include <sonar.hpp>
Public Member Functions | |
| virtual bool | init (void)=0 |
| Initialise the sensor. | |
| virtual bool | update (void)=0 |
| Main update function Reads new values from sensor. | |
| virtual const float & | last_update_us (void) const =0 |
| Get last update time in microseconds. | |
| virtual const std::array < float, 3 > & | orientation_bf (void) const =0 |
| Get sensor orientation relative to the platform (in body frame) | |
| virtual const float & | distance (void) const =0 |
| Get latest distance measure. | |
| virtual const float & | velocity (void) const =0 |
| Get velocity estimate from consecutive measurements. | |
| virtual const bool & | healthy (void) const =0 |
| Indicates whether the measurements can be trusted. | |
Abstarct class for sonars.
| virtual const float& Sonar::distance | ( | void | ) | const [pure virtual] |
Get latest distance measure.
Implemented in Sonar_sim, and Sonar_i2cxl.

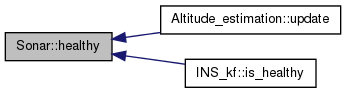
| virtual const bool& Sonar::healthy | ( | void | ) | const [pure virtual] |
Indicates whether the measurements can be trusted.
Implemented in Sonar_sim, and Sonar_i2cxl.
| virtual bool Sonar::init | ( | void | ) | [pure virtual] |
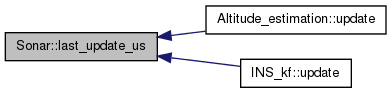
| virtual const float& Sonar::last_update_us | ( | void | ) | const [pure virtual] |
Get last update time in microseconds.
Implemented in Sonar_sim, and Sonar_i2cxl.
| virtual const std::array<float, 3>& Sonar::orientation_bf | ( | void | ) | const [pure virtual] |
Get sensor orientation relative to the platform (in body frame)
Implemented in Sonar_sim, and Sonar_i2cxl.
| virtual bool Sonar::update | ( | void | ) | [pure virtual] |
Main update function Reads new values from sensor.
Implemented in Sonar_sim, and Sonar_i2cxl.
| virtual const float& Sonar::velocity | ( | void | ) | const [pure virtual] |
Get velocity estimate from consecutive measurements.
Implemented in Sonar_sim, and Sonar_i2cxl.
 1.7.6.1
1.7.6.1

