List of all members.
Public Member Functions |
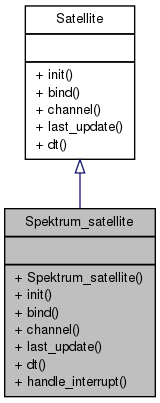
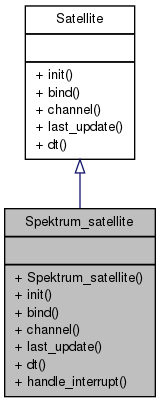
| | Spektrum_satellite (Serial &uart, Gpio &receiver_pin, Gpio &power_pin) |
| | Constructor.
|
|
bool | init (void) |
| | Initialize UART receiver for Spektrum/DSM2 slave receivers.
|
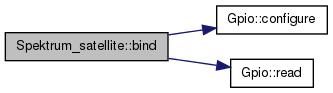
| void | bind (radio_protocol_t protocol) |
| | Sets the satellite in bind mode.
|
| int16_t | channel (const uint8_t channel_number) const |
| | Return a channels' value.
|
| uint32_t | last_update (void) const |
| | Return the last update time in microseconds.
|
| uint32_t | dt (void) const |
| | Return the time difference between the last 2 updates in microseconds.
|
|
void | handle_interrupt (void) |
| | Takes care of incoming data.
|
Constructor & Destructor Documentation
Constructor.
- Parameters:
-
| uart | Reference to UART device |
| receiver_pin | Reference to signal GPIO |
| power_pin | Reference to power GPIO |
Member Function Documentation
Sets the satellite in bind mode.
- Parameters:
-
| protocol | Channel encoding. It it either 10bits (up to 7 channels) or 11bits(up to 14 channels). We support both. |
Implements Satellite.
Return a channels' value.
- Parameters:
-
| channel_number | The channel ID |
- Returns:
- Value for channel channel_number
Implements Satellite.
Return the time difference between the last 2 updates in microseconds.
- Returns:
- dt
Implements Satellite.
Return the last update time in microseconds.
- Returns:
- Last update time
Implements Satellite.
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/drivers/spektrum_satellite.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/drivers/spektrum_satellite.cpp

 1.7.6.1
1.7.6.1

