|
MAV'RIC
|
|
MAV'RIC
|
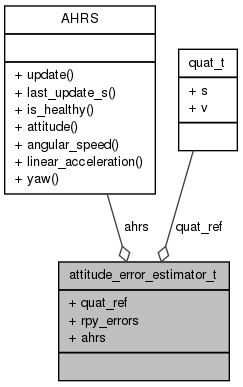
Quaternion attitude error estimator data structure. More...
#include <attitude_error_estimator.hpp>
Public Attributes | |
| quat_t | quat_ref |
| Reference attitude, the errors in roll pitch and yaw will be computed relative to this reference. | |
| float | rpy_errors [3] |
| Local errors: roll, pitch and yaw. | |
| const AHRS * | ahrs |
| Pointer to AHRS (current attitude), must be updated externally. | |
Quaternion attitude error estimator data structure.
 1.7.6.1
1.7.6.1

