|
MAV'RIC
|
|
MAV'RIC
|
Structure of the acoustic data. More...
#include <acoustic.hpp>
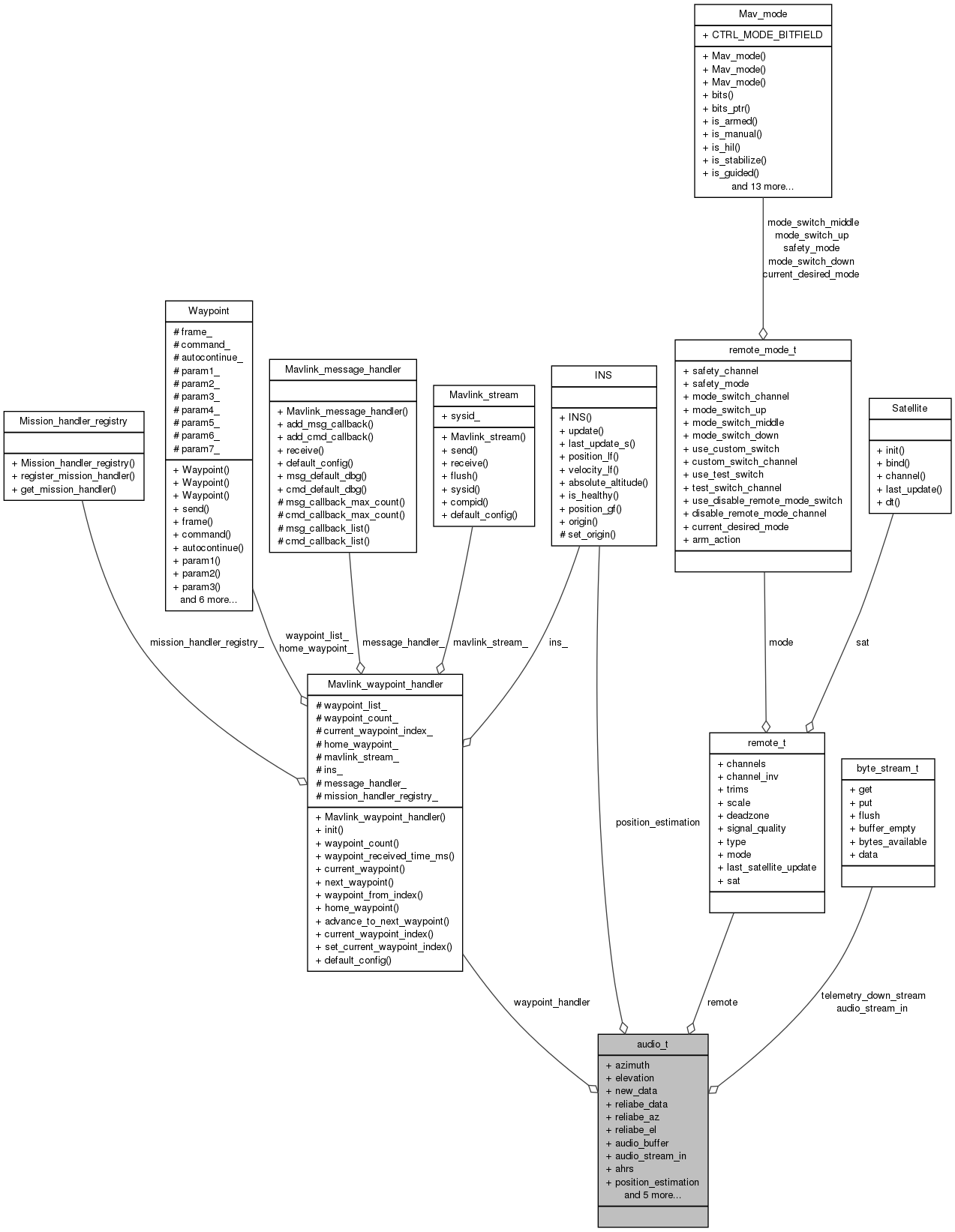
Public Attributes | |
| int16_t | azimuth |
| The azimuth angle corresponds to the horizontal orientation of the sound. | |
| int16_t | elevation |
| The elevation angle corresponds to the vertical orientation of the sound. | |
| bool | new_data |
| The flag to tell that new data are available. | |
| bool | reliabe_data |
| The flag to tell that new data are reliable. | |
| float | reliabe_az |
| Number of reliable azimuth measurement. | |
| float | reliabe_el |
| Number of reliable elevation measurement. | |
| buffer_t | audio_buffer |
| Acoustic buffer. | |
| byte_stream_t | audio_stream_in |
| Acoustic in coming stream. | |
| ahrs_t * | ahrs |
| The pointer to the attitude estimation structure. | |
| INS * | position_estimation |
| The pointer to the position estimation structure. | |
| remote_t * | remote |
| The pointer to the remote structure. | |
| navigation_t * | navigation |
| The pointer to the navigation control structure. | |
| stabilisation_copter_t * | stabilisation_copter |
| The pointer to the stabilization copter structure. | |
| control_command_t * | controls_nav |
| The pointer to the control structure. | |
| Mavlink_waypoint_handler * | waypoint_handler |
| The pointer to the waypoint handler structure. | |
| byte_stream_t * | telemetry_down_stream |
| The pointer to the down coming telemetry byte stream. | |
Structure of the acoustic data.
 1.7.6.1
1.7.6.1

