|
MAV'RIC
|
|
MAV'RIC
|
structure of the i2cxl_sonar module More...
#include <daler_dc_motor_ctrl.h>
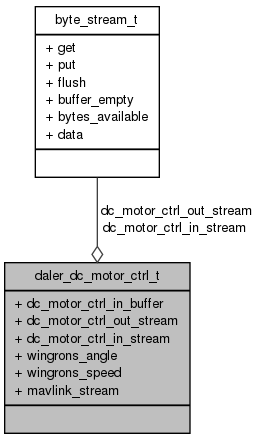
Public Attributes | |
| buffer_t | dc_motor_ctrl_in_buffer |
| The dc_motor_ctrl incoming buffer. | |
| byte_stream_t | dc_motor_ctrl_out_stream |
| The dc_motor_ctrl outgoing byte stream. | |
| byte_stream_t | dc_motor_ctrl_in_stream |
| The dc_motor_ctrl incoming byte stream. | |
| float | wingrons_angle [2] |
| Angles wanted for the wingrons dc_motors. | |
| float | wingrons_speed [2] |
| Wanted speed for the wingrons dc_motors. | |
| const mavlink_stream_t * | mavlink_stream |
| Pointer to mavlink stream. | |
structure of the i2cxl_sonar module
 1.7.6.1
1.7.6.1

