|
MAV'RIC
|
|
MAV'RIC
|
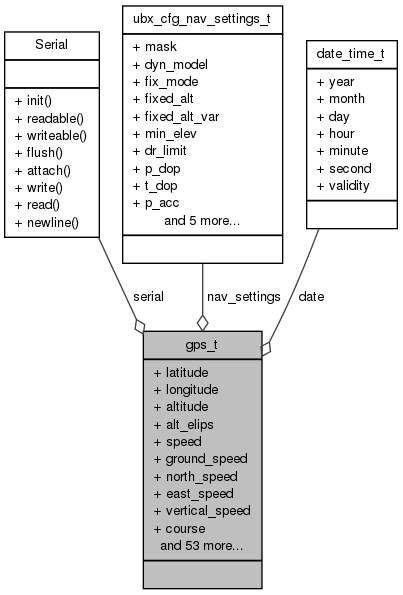
Type definition for GPS data. More...
Public Attributes | |
| double | latitude |
| Latitude in degrees. | |
| double | longitude |
| Longitude in degrees. | |
| float | altitude |
| Altitude in m. | |
| float | alt_elips |
| Altitude above ellipsoid in m. | |
| float | speed |
| 3D speed in m/s | |
| float | ground_speed |
| 2D ground speed in m/s | |
| float | north_speed |
| The speed to the north in m/s. | |
| float | east_speed |
| The speed to the east in m/s. | |
| float | vertical_speed |
| The vertical speed in m/s. | |
| float | course |
| Heading in degree * 100. | |
| float | horizontal_accuracy |
| Horizontal accuracy in m. | |
| float | vertical_accuracy |
| Vertical accuracy in m. | |
| float | speed_accuracy |
| Speed accuracy in m. | |
| float | heading_accuracy |
| Heading accuracy in m. | |
| uint8_t | num_sats |
| Number of visible satellites. | |
| uint16_t | hdop |
| Height DOP. | |
| uint32_t | time_last_msg |
| Time reference in ms of microcontroller. | |
| uint32_t | time_gps |
| Time reference in ms of gps. | |
| gps_fix_t | status |
| GPS status. | |
| uint8_t | horizontal_status |
| Horizontal status. | |
| uint8_t | altitude_status |
| Altitude status. | |
| uint8_t | speed_status |
| Speed status. | |
| uint8_t | course_status |
| Course status. | |
| uint8_t | accuracy_status |
| Accuracy status. | |
| bool | healthy |
| Healthiness of the GPS. | |
| date_time_t | date |
| The date type. | |
| uint8_t | time_zone |
| The current time zone. | |
| uint8_t | disable_counter |
| Counter used to deactivate unwanted messages. | |
| uint32_t | idle_timer |
| Last time that the GPS driver got a good packet from the GPS. | |
| uint32_t | idle_timeout |
| Time in milliseconds after which we will assume the GPS is no longer sending us updates and attempt a re-init. 1200ms allows a small amount of slack over the worst-case 1Hz update rate. | |
| bool | new_position |
| Boolean value to check if we received new position message. | |
| bool | new_speed |
| Boolean value to check if we received new velocity message. | |
| bool | next_fix |
| Boolean variable to get whether we have a correct GPS fix or not. | |
| bool | have_raw_velocity |
| Boolean variable that could be used to get a speed approximate with heading and 2D velocity. | |
| uint8_t | num_skipped_msg |
| Number of skipped messages. | |
| uint8_t | loop_pos_llh |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_vel_ned |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_status |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_solution |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_tim_tp |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_tim_vrfy |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_nav_timeutc |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_mon_rxr |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_sv_info |
| Counter used to print one message every num_skipped_msg. | |
| uint8_t | loop_nav_dgps |
| Counter used to print one message every num_skipped_msg. | |
| bool | print_nav_on_debug |
| Flag to print messages on debug console. | |
| bool | debug |
| Indicates if debug messages should be printed. | |
| uint32_t | time_last_posllh_msg |
| Time at which the last POSLLH message was received. | |
| uint32_t | time_last_velned_msg |
| Time at which the last VELNED message was received. | |
| gps_decode_msg_state_machine_t | step |
| Variable defining the state machine in the U-Blox decoding function. | |
| uint8_t | ubx_class |
| The U-Blox message class. | |
| uint8_t | msg_id |
| The U-Blox message ID. | |
| uint16_t | payload_counter |
| The incremental counter to receive bytes of data. | |
| uint16_t | payload_length |
| The length of the message. | |
| uint8_t | cksum_a |
| Checksum a. | |
| uint8_t | cksum_b |
| Checksum b. | |
| gps_engine_setting_t | engine_nav_setting |
| Enum GPS engine setting. | |
| ubx_cfg_nav_settings_t | nav_settings |
| CFG-NAV settings structure. | |
| bool | configure_gps |
| A flag to start the configuration of the GPS. | |
| uint16_t | config_loop_count |
| The counter for the configuration of the GPS. | |
| uint16_t | config_nav_msg_count |
| The counter for the configuration of the GPS when there is multiple message of the same kind. | |
| uint32_t | configure_timer |
| A timer to resend the configuration message if needed. | |
| bool | acknowledged_received |
| A flag to know if the GPS received the configuration message. | |
| Serial * | serial |
| Pointer to serial device. | |
Type definition for GPS data.
 1.7.6.1
1.7.6.1

