|
MAV'RIC
|
|
MAV'RIC
|
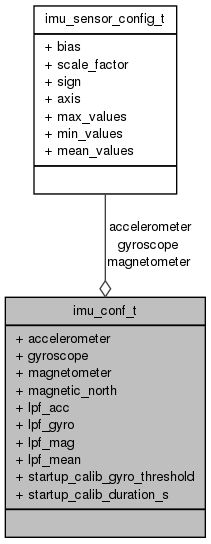
The configuration IMU structure. More...
#include <imu.hpp>
Public Attributes | |
| imu_sensor_config_t | accelerometer |
| The gyroscope configuration structure. | |
| imu_sensor_config_t | gyroscope |
| The accelerometer configuration structure. | |
| imu_sensor_config_t | magnetometer |
| The compass configuration structure. | |
| std::array< float, 3 > | magnetic_north |
| X, Y and Z components of magnetic north vector (includes magnetic inclination) | |
| float | lpf_acc |
| Low pass filter gain for accelerometer. | |
| float | lpf_gyro |
| Low pass filter gain for accelerometer. | |
| float | lpf_mag |
| Low pass filter gain for accelerometer. | |
| float | lpf_mean |
| Low pass filter gain for the mean values. | |
| float | startup_calib_gyro_threshold |
| Threshold on gyroscope value used to decide wheter the autopilot is held stable. | |
| float | startup_calib_duration_s |
| Duration in seconds of the automatic startup calibration of gyroscopes. | |
The configuration IMU structure.
 1.7.6.1
1.7.6.1

