|
MAV'RIC
|
|
MAV'RIC
|
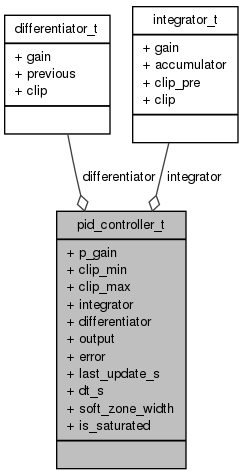
PID controller. More...
#include <pid_controller.hpp>
Public Attributes | |
| float | p_gain |
| Proportional gain. | |
| float | clip_min |
| Min clipping values. | |
| float | clip_max |
| Max clipping values. | |
| integrator_t | integrator |
| Integrator parameters. | |
| differentiator_t | differentiator |
| Differentiator parameters. | |
| float | output |
| Output. | |
| float | error |
| Error. | |
| float | last_update_s |
| Last update time in seconds. | |
| float | dt_s |
| Time step. | |
| float | soft_zone_width |
| Approximate width of a "soft zone" on the error input, i.e. a region of low gain around the target point. Value 0 -> switched off. | |
| bool | is_saturated |
| Boolean indicated if at last update the output was saturated, this is used as integrator antiwinding. | |
PID controller.
 1.7.6.1
1.7.6.1

