|
MAV'RIC
|
|
MAV'RIC
|
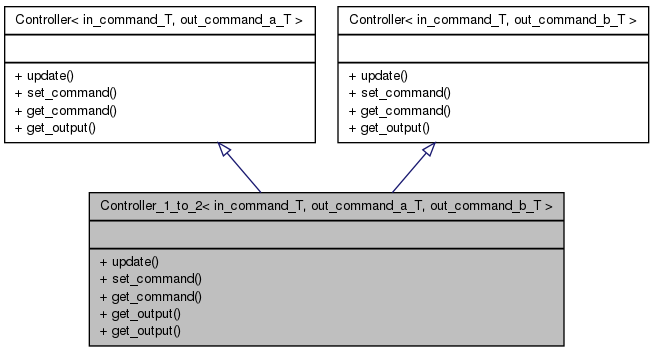
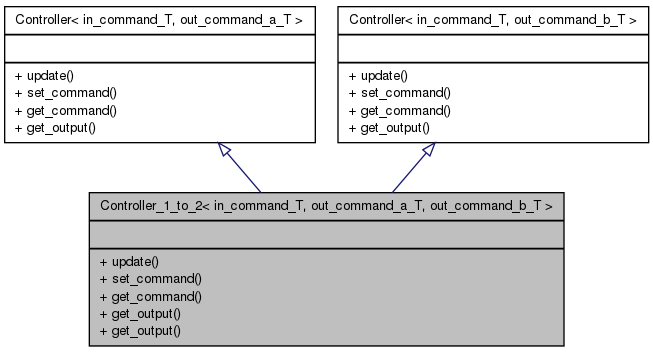
Interface for controllers with one input command type and two output command types. More...
#include <controller.hpp>
Public Types | |
| typedef in_command_T | in_command_t |
| typedef out_command_a_T | out_command_a_t |
| typedef out_command_b_T | out_command_b_t |
Public Member Functions | |
| virtual bool | update (void)=0 |
| Main update function. | |
| virtual bool | set_command (const in_command_t &command)=0 |
| Sets the input command. | |
| virtual bool | get_command (in_command_t &command) const =0 |
| Returns the input command. | |
| virtual bool | get_output (out_command_a_t &command) const =0 |
| Returns the output command. | |
| virtual bool | get_output (out_command_b_t &command) const =0 |
| Returns the output command. | |
Interface for controllers with one input command type and two output command types.
| virtual bool Controller_1_to_2< in_command_T, out_command_a_T, out_command_b_T >::get_command | ( | in_command_t & | command | ) | const [pure virtual] |
Returns the input command.
| command | Input command |
Implements Controller< in_command_T, out_command_b_T >.
Implemented in Velocity_controller.

| virtual bool Controller_1_to_2< in_command_T, out_command_a_T, out_command_b_T >::get_output | ( | out_command_a_t & | command | ) | const [pure virtual] |
Returns the output command.
| command | output command |
Implements Controller< in_command_T, out_command_a_T >.
Implemented in Velocity_controller.
| virtual bool Controller_1_to_2< in_command_T, out_command_a_T, out_command_b_T >::get_output | ( | out_command_b_t & | command | ) | const [pure virtual] |
Returns the output command.
| command | output command |
Implements Controller< in_command_T, out_command_b_T >.
Implemented in Velocity_controller.
| virtual bool Controller_1_to_2< in_command_T, out_command_a_T, out_command_b_T >::set_command | ( | const in_command_t & | command | ) | [pure virtual] |
Sets the input command.
| command | Input command |
Implements Controller< in_command_T, out_command_b_T >.
Implemented in Velocity_controller.

| virtual bool Controller_1_to_2< in_command_T, out_command_a_T, out_command_b_T >::update | ( | void | ) | [pure virtual] |
Main update function.
Implements Controller< in_command_T, out_command_b_T >.
Implemented in Velocity_controller.
 1.7.6.1
1.7.6.1

