|
MAV'RIC
|
|
MAV'RIC
|
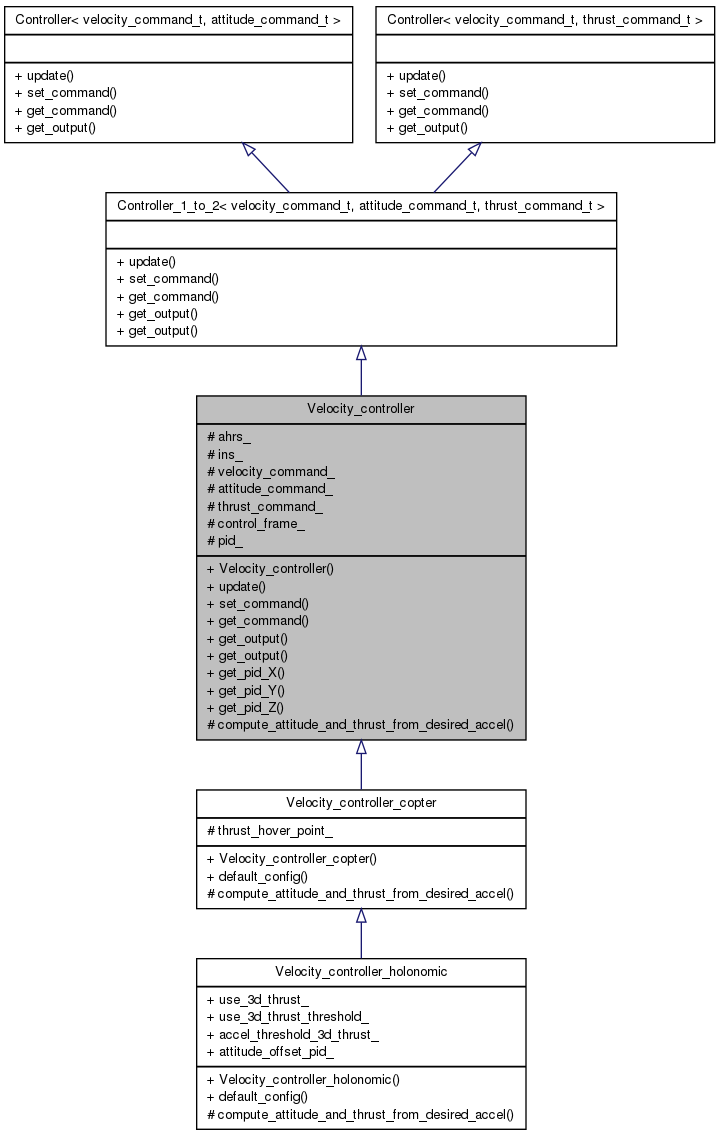
Velocity controller for hovering platforms. More...
#include <velocity_controller.hpp>
Classes | |
| struct | args_t |
| Required arguments. More... | |
| struct | conf_t |
| Velocity controller configuration. More... | |
Public Types | |
| enum | control_frame_t { LOCAL_FRAME = 0, SEMILOCAL_FRAME = 1, BODY_FRAME = 2 } |
| Reference frame in which the control is done. More... | |
Public Member Functions | |
| Velocity_controller (const args_t &args, const conf_t &config) | |
| Constructor. | |
| bool | update (void) |
| Main update function. | |
| bool | set_command (const velocity_command_t &vel) |
| Sets the input command. | |
| bool | get_command (velocity_command_t &vel) const |
| Returns the input command. | |
| bool | get_output (attitude_command_t &att) const |
| Returns the output command. | |
| bool | get_output (thrust_command_t &thrust) const |
| Returns the output command. | |
| pid_controller_t & | get_pid_X (void) |
| Gives acces to internal pid_controller. | |
| pid_controller_t & | get_pid_Y (void) |
| pid_controller_t & | get_pid_Z (void) |
Protected Member Functions | |
| virtual bool | compute_attitude_and_thrust_from_desired_accel (const std::array< float, 3 > &accel_vector, attitude_command_t &attitude_command, thrust_command_t &thrust_command)=0 |
| Computes attitude and thrust command based on desired acceleration. Depends on robot dynamics. | |
Protected Attributes | |
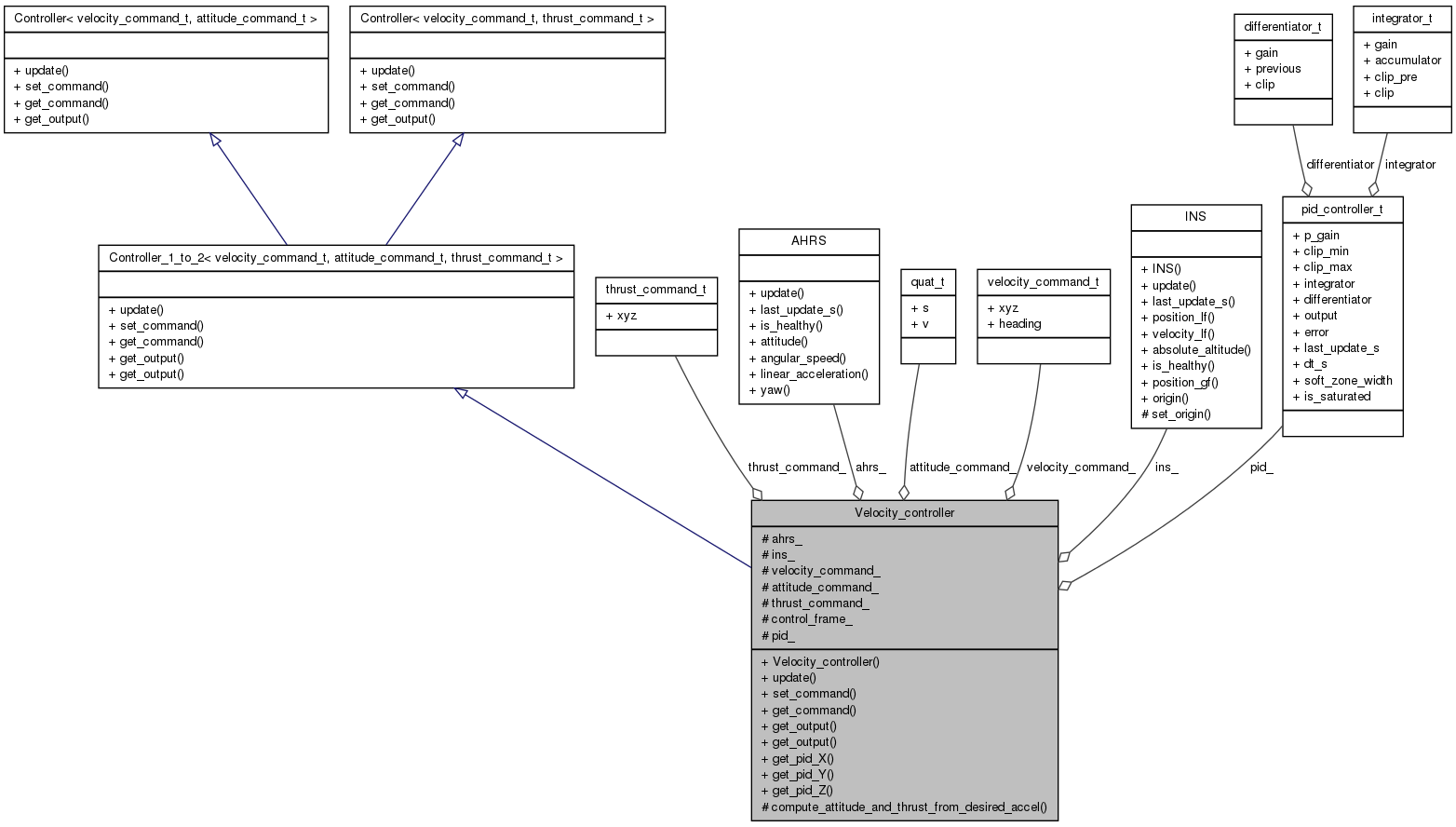
| const AHRS & | ahrs_ |
| Pointer to attitude estimation (input) | |
| const INS & | ins_ |
| Speed and position estimation (input) | |
| velocity_command_t & | velocity_command_ |
| Velocity command (input) | |
| attitude_command_t & | attitude_command_ |
| Attitude command (output) | |
| thrust_command_t & | thrust_command_ |
| Thrust command (output) | |
| control_frame_t | control_frame_ |
| Reference frame in which the control is don. | |
| pid_controller_t | pid_ [3] |
| PID controller for velocity along X, Y and Z in global frame. | |
Velocity controller for hovering platforms.
| Velocity_controller::Velocity_controller | ( | const args_t & | args, |
| const conf_t & | config | ||
| ) |
Constructor.
| args | Required arguments |
| config | Configuration |
| virtual bool Velocity_controller::compute_attitude_and_thrust_from_desired_accel | ( | const std::array< float, 3 > & | accel_vector, |
| attitude_command_t & | attitude_command, | ||
| thrust_command_t & | thrust_command | ||
| ) | [protected, pure virtual] |
Computes attitude and thrust command based on desired acceleration. Depends on robot dynamics.
| accel_vector | Desired acceleration vectors (input) |
| attitude_command | Attitude command (output) |
| thrust_command | Thrust command (output) |
Implemented in Velocity_controller_copter, and Velocity_controller_holonomic.

| bool Velocity_controller::get_command | ( | velocity_command_t & | vel | ) | const [virtual] |
Returns the input command.
| command | Input command |
Implements Controller_1_to_2< velocity_command_t, attitude_command_t, thrust_command_t >.
| bool Velocity_controller::get_output | ( | attitude_command_t & | att | ) | const [virtual] |
Returns the output command.
| command | output command |
Implements Controller_1_to_2< velocity_command_t, attitude_command_t, thrust_command_t >.
| bool Velocity_controller::get_output | ( | thrust_command_t & | thrust | ) | const [virtual] |
Returns the output command.
| command | output command |
Implements Controller_1_to_2< velocity_command_t, attitude_command_t, thrust_command_t >.
| pid_controller_t & Velocity_controller::get_pid_X | ( | void | ) |
Gives acces to internal pid_controller.
| bool Velocity_controller::set_command | ( | const velocity_command_t & | vel | ) | [virtual] |
Sets the input command.
| command | Input command |
Implements Controller_1_to_2< velocity_command_t, attitude_command_t, thrust_command_t >.
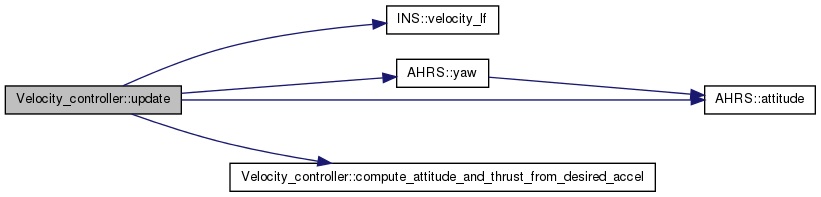
| bool Velocity_controller::update | ( | void | ) | [virtual] |
Main update function.
Implements Controller_1_to_2< velocity_command_t, attitude_command_t, thrust_command_t >.
 1.7.6.1
1.7.6.1

