|
MAV'RIC
|
|
MAV'RIC
|
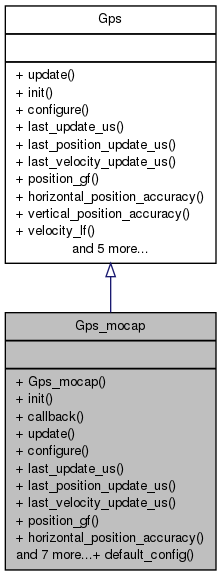
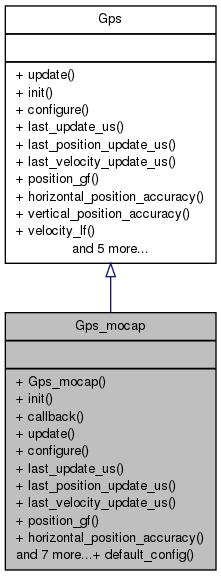
Class to expose data received from motion capture system as GPS data. More...
#include <gps_mocap.hpp>
Classes | |
| struct | conf_t |
| Configuration structure. More... | |
Public Member Functions | |
| Gps_mocap (Mavlink_message_handler &message_handler, conf_t config=default_config()) | |
| Constructor. | |
| bool | init (void) |
| Initializes callback to mavlink messages. | |
| void | callback (uint32_t sysid, const mavlink_message_t *msg) |
| Method used to update internal state when a message is received. | |
| bool | update (void) |
| Main update function Reads new values from sensor. | |
| void | configure (void) |
| Configure the GPS. | |
| float | last_update_us (void) const |
| Get last update time in microseconds. | |
| float | last_position_update_us (void) const |
| Get last position update time in microseconds. | |
| float | last_velocity_update_us (void) const |
| Get last velocity update time in microseconds. | |
| global_position_t | position_gf (void) const |
| Get position in global frame. | |
| float | horizontal_position_accuracy (void) const |
| Get horizontal position accuracy in m. | |
| float | vertical_position_accuracy (void) const |
| Get vertical position accuracy in m. | |
| std::array< float, 3 > | velocity_lf (void) const |
| Get velocity in local frame in m/s. | |
| float | velocity_accuracy (void) const |
| Get velocity accuracy in m/s. | |
| float | heading (void) const |
| Get heading in degrees. | |
| float | heading_accuracy (void) const |
| Get heading accuracy in degrees. | |
| uint8_t | num_sats (void) const |
| Get the number of satellites. | |
| gps_fix_t | fix (void) const |
| Indicates whether fix are received. | |
| bool | healthy (void) const |
| Indicates whether the measurements can be trusted. | |
Static Public Member Functions | |
| static conf_t | default_config () |
| Default configuration structure. | |
Class to expose data received from motion capture system as GPS data.
The mocap data is received via mavlink messages of type ATT_POS_MOCAP
| void Gps_mocap::callback | ( | uint32_t | sysid, |
| const mavlink_message_t * | msg | ||
| ) |
Method used to update internal state when a message is received.
| sysid | ID of the system |
| msg | Pointer to the incoming message |
| Gps_mocap::conf_t Gps_mocap::default_config | ( | void | ) | [inline, static] |
Default configuration structure.
| gps_fix_t Gps_mocap::fix | ( | void | ) | const [virtual] |
Indicates whether fix are received.
Implements Gps.

| float Gps_mocap::heading | ( | void | ) | const [virtual] |
| float Gps_mocap::heading_accuracy | ( | void | ) | const [virtual] |
| bool Gps_mocap::healthy | ( | void | ) | const [virtual] |
Indicates whether the measurements can be trusted.
Implements Gps.

| float Gps_mocap::horizontal_position_accuracy | ( | void | ) | const [virtual] |
| bool Gps_mocap::init | ( | void | ) | [virtual] |
Initializes callback to mavlink messages.
Implements Gps.

| float Gps_mocap::last_position_update_us | ( | void | ) | const [virtual] |
Get last position update time in microseconds.
Implements Gps.

| float Gps_mocap::last_update_us | ( | void | ) | const [virtual] |
Get last update time in microseconds.
Implements Gps.

| float Gps_mocap::last_velocity_update_us | ( | void | ) | const [virtual] |
| uint8_t Gps_mocap::num_sats | ( | void | ) | const [virtual] |
| global_position_t Gps_mocap::position_gf | ( | void | ) | const [virtual] |
| bool Gps_mocap::update | ( | void | ) | [virtual] |
| float Gps_mocap::velocity_accuracy | ( | void | ) | const [virtual] |
| std::array< float, 3 > Gps_mocap::velocity_lf | ( | void | ) | const [virtual] |
| float Gps_mocap::vertical_position_accuracy | ( | void | ) | const [virtual] |
 1.7.6.1
1.7.6.1

