|
MAV'RIC
|
|
MAV'RIC
|
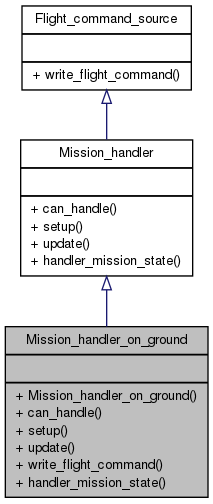
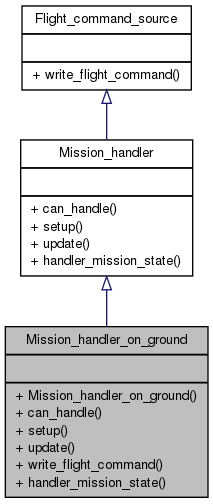
The mission handler for the on ground state. More...
#include <mission_handler_on_ground.hpp>
Public Member Functions | |
| Mission_handler_on_ground () | |
| Initialize the on ground mission planner handler. | |
| virtual bool | can_handle (const Waypoint &wpt) const |
| Checks if the waypoint is on the ground. | |
| virtual bool | setup (const Waypoint &wpt) |
| Does nothing. | |
| virtual Mission_handler::update_status_t | update () |
| Returns MISSION_IN_PROGRESS. | |
| virtual bool | write_flight_command (Flight_controller &flight_controller) const |
| Provides control commands to the flight controller. | |
| virtual Mission_planner::internal_state_t | handler_mission_state () const |
| Returns that the mission state is in STANDBY. | |
The mission handler for the on ground state.
| bool Mission_handler_on_ground::can_handle | ( | const Waypoint & | wpt | ) | const [virtual] |
Checks if the waypoint is on the ground.
DOES NOT CURRENTLY CHECK IF WE ARE ON GROUND
| wpt | The waypoint class |
Implements Mission_handler.

| Mission_planner::internal_state_t Mission_handler_on_ground::handler_mission_state | ( | ) | const [virtual] |
Returns that the mission state is in STANDBY.
Implements Mission_handler.
| bool Mission_handler_on_ground::setup | ( | const Waypoint & | wpt | ) | [virtual] |
Does nothing.
Does nothing
| wpt | The waypoint class |
Implements Mission_handler.
| Mission_handler::update_status_t Mission_handler_on_ground::update | ( | void | ) | [virtual] |
Returns MISSION_IN_PROGRESS.
Sets thrust to low and returns MISSION_IN_PROGRESS
Implements Mission_handler.
| bool Mission_handler_on_ground::write_flight_command | ( | Flight_controller & | flight_controller | ) | const [virtual] |
Provides control commands to the flight controller.
Implements Flight_command_source.

 1.7.6.1
1.7.6.1

