|
MAV'RIC
|
|
MAV'RIC
|
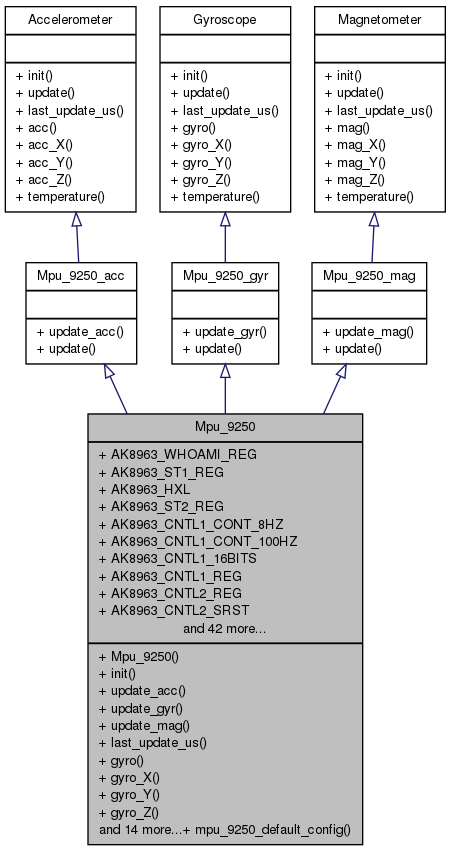
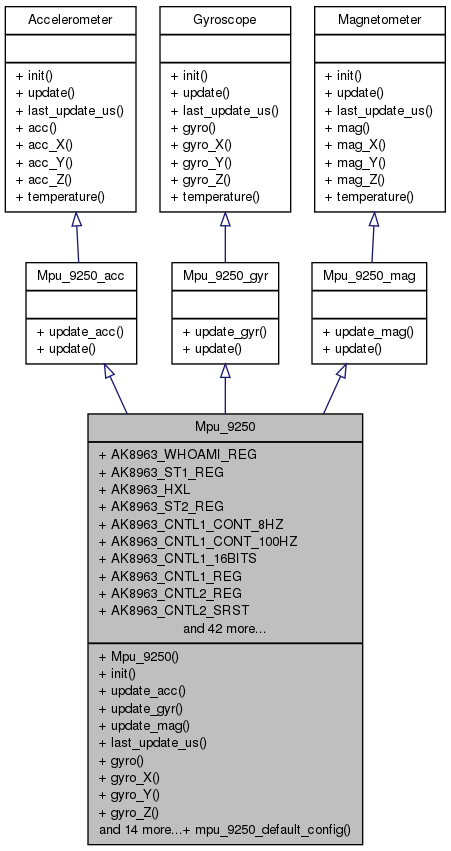
Driver for sensor MPU 9250. More...
#include <mpu_9250.hpp>
Classes | |
| struct | conf_t |
| Configuration structure for mpu 9250. More... | |
Public Types | |
| enum | acc_filter_t { ACC_LOWPASS_460_HZ = 0x00, ACC_LOWPASS_184_HZ = 0x01, ACC_LOWPASS_92_HZ = 0x02, ACC_LOWPASS_41_HZ = 0x03, ACC_LOWPASS_20_HZ = 0x04, ACC_LOWPASS_10_HZ = 0x05, ACC_LOWPASS_5_HZ = 0x06 } |
| enum | acc_range_t { ACC_2G = 0x00, ACC_4G = 0x08, ACC_8G = 0x10, ACC_16G = 0x18 } |
| enum | gyro_filter_t { GYRO_LOWPASS_250_HZ = 0x00, GYRO_LOWPASS_184_HZ = 0x01, GYRO_LOWPASS_92_HZ = 0x02, GYRO_LOWPASS_41_HZ = 0x03, GYRO_LOWPASS_20_HZ = 0x04, GYRO_LOWPASS_10_HZ = 0x05, GYRO_LOWPASS_5_HZ = 0x06 } |
| enum | gyro_range_t { GYRO_250_DEG = 0x00, GYRO_500_DEG = 0x08, GYRO_1000_DEG = 0x10, GYRO_2000_DEG = 0x18 } |
Public Member Functions | |
| Mpu_9250 (Spi &spi, Gpio &nss_gpio, const conf_t config=mpu_9250_default_config()) | |
| Constructor. | |
| bool | init (void) |
| Initialise the sensor. | |
| bool | update_acc (void) |
| Main update function. | |
| bool | update_gyr (void) |
| bool | update_mag (void) |
| const float & | last_update_us (void) const |
| Get last update time in microseconds. | |
| const std::array< float, 3 > & | gyro (void) const |
| Get X, Y and Z components of angular velocity. | |
| const float & | gyro_X (void) const |
| Get X component of angular velocity. | |
| const float & | gyro_Y (void) const |
| Get Y component of angular velocity. | |
| const float & | gyro_Z (void) const |
| Get Z component of angular velocity. | |
| const std::array< float, 3 > & | acc (void) const |
| Get X, Y and Z components of acceleration. | |
| const float & | acc_X (void) const |
| Get X component of acceleration. | |
| const float & | acc_Y (void) const |
| Get Y component of acceleration. | |
| const float & | acc_Z (void) const |
| Get Z component of acceleration. | |
| const std::array< float, 3 > & | mag (void) const |
| Get X, Y and Z components of magnetic field. | |
| const float & | mag_X (void) const |
| Get X component of magnetic field. | |
| const float & | mag_Y (void) const |
| Get Y component of magnetic field. | |
| const float & | mag_Z (void) const |
| Get Z component of magnetic field. | |
| const float & | temperature (void) const |
| Get sensor temperature. | |
| bool | mpu_reset (void) |
| Reset acc and gyro. | |
| bool | mag_reset (void) |
| Reset magnetometer. | |
| bool | mag_read_reg (uint8_t reg, uint8_t *in_data) |
| Read register from magnetometer. | |
| bool | mag_write_reg (uint8_t reg, uint8_t *out_data) |
| Write values in register of ak8963. | |
| bool | write_reg (uint8_t reg, uint8_t *out_data, uint32_t nbytes=1) |
| Write register of mpu 9250. | |
| bool | read_reg (uint8_t reg, uint8_t *in_data, uint32_t nbytes=1) |
| Read register of mpu 9250. | |
Static Public Member Functions | |
| static conf_t | mpu_9250_default_config () |
| Default configuration for mpu 9250. | |
Static Public Attributes | |
| static const uint8_t | AK8963_WHOAMI_REG = 0x00 |
| static const uint8_t | AK8963_ST1_REG = 0x02 |
| static const uint8_t | AK8963_HXL = 0x03 |
| static const uint8_t | AK8963_ST2_REG = 0x09 |
| static const uint8_t | AK8963_CNTL1_CONT_8HZ = 0x02 |
| static const uint8_t | AK8963_CNTL1_CONT_100HZ = 0x06 |
| static const uint8_t | AK8963_CNTL1_16BITS = 0x10 |
| static const uint8_t | AK8963_CNTL1_REG = 0x0A |
| static const uint8_t | AK8963_CNTL2_REG = 0x0B |
| static const uint8_t | AK8963_CNTL2_SRST = 0x01 |
| static const uint8_t | AK8963_WHOAMI_ID = 0x48 |
| static const uint8_t | AK8963_ADDR = 0x0C |
| static const uint8_t | SMPLRT_DIV_REG = 0x19 |
| static const uint8_t | DLPF_CFG_REG = 0x1A |
| static const uint8_t | GYRO_CFG_REG = 0x1B |
| static const uint8_t | ACCEL_CFG_REG = 0x1C |
| static const uint8_t | ACCEL_CFG2_REG = 0x1D |
| static const uint8_t | SLV0_ADDR_REG = 0x25 |
| static const uint8_t | SLV0_REG_REG = 0x26 |
| static const uint8_t | SLV0_CTRL_REG = 0x27 |
| static const uint8_t | SLV4_ADDR_REG = 0x31 |
| static const uint8_t | SLV4_REG_REG = 0x32 |
| static const uint8_t | SLV4_DO_REG = 0x33 |
| static const uint8_t | SLV4_CTRL_REG = 0x34 |
| static const uint8_t | SLV4_DI_REG = 0x35 |
| static const uint8_t | I2C_MST_STATUS_REG = 0x36 |
| static const uint8_t | ACCEL_X_OUT_MSB = 0x3B |
| static const uint8_t | ACCEL_X_OUT_LSB = 0x3C |
| static const uint8_t | ACCEL_Y_OUT_MSB = 0x3D |
| static const uint8_t | ACCEL_Y_OUT_LSB = 0x3E |
| static const uint8_t | ACCEL_Z_OUT_MSB = 0x3F |
| static const uint8_t | ACCEL_Z_OUT_LSB = 0x40 |
| static const uint8_t | GYRO_X_OUT_MSB = 0x43 |
| static const uint8_t | GYRO_X_OUT_LSB = 0x44 |
| static const uint8_t | GYRO_Y_OUT_MSB = 0x45 |
| static const uint8_t | GYRO_Y_OUT_LSB = 0x46 |
| static const uint8_t | GYRO_Z_OUT_MSB = 0x47 |
| static const uint8_t | GYRO_Z_OUT_LSB = 0x48 |
| static const uint8_t | EXT_SENS_DATA_00 = 0x49 |
| static const uint8_t | USER_CTRL_REG = 0x6A |
| static const uint8_t | PWR_MGMT_REG = 0x6B |
| static const uint8_t | WHOAMI_REG = 0x75 |
| static const uint8_t | READ_FLAG = 0x80 |
| static const uint8_t | WRITE_FLAG = 0x7f |
| static const uint8_t | WHOAMI_ID = 0x71 |
| static const uint8_t | I2C_MST_SLV4_NACK = 0x10 |
| static const uint8_t | I2C_MST_SLV4_DONE = 0x40 |
| static const uint8_t | I2CSLV_EN = 0x80 |
| static const uint8_t | PWRMGMT_IMU_RST = 0x80 |
| static const uint8_t | PWRMGMT_PLL_X_CLK = 0x01 |
| static const uint8_t | USERCTL_DIS_I2C = 0x10 |
| static const uint8_t | USERCTL_I2C_MST_EN = 0x20 |
| static const uint8_t | USERCTL_GYRO_RST = 0x01 |
Driver for sensor MPU 9250.
This sensor is at the same time a accelerometer and a gyroscope and a magnetometer The inherited method Accelerometer::update is implemented as Mpu9250::update_acc The inherited method Gyroscope::update is implemented as Mpu9250::update_gyr The inherited method Magnetometer::update is implemented as Mpu9250::update_mag
| Mpu_9250::Mpu_9250 | ( | Spi & | spi, |
| Gpio & | nss_gpio, | ||
| const conf_t | config = mpu_9250_default_config() |
||
| ) |
Constructor.
| spi | Reference to SPI device |
| nss_gpio | Reference to Slave Select GPIO |
| config | Device configuration |
| const std::array< float, 3 > & Mpu_9250::acc | ( | void | ) | const [virtual] |
Get X, Y and Z components of acceleration.
This is raw data, so X, Y and Z components are biased, are scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal and axis rotations
Implements Accelerometer.
| const float & Mpu_9250::acc_X | ( | void | ) | const [virtual] |
Get X component of acceleration.
This is raw data, so X, Y and Z components are biased, are scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal and axis rotations
Implements Accelerometer.
| const float & Mpu_9250::acc_Y | ( | void | ) | const [virtual] |
Get Y component of acceleration.
This is raw data, so X, Y and Z components are biased, are scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal and axis rotations
Implements Accelerometer.
| const float & Mpu_9250::acc_Z | ( | void | ) | const [virtual] |
Get Z component of acceleration.
This is raw data, so X, Y and Z components are biased, are scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal and axis rotations
Implements Accelerometer.
| const std::array< float, 3 > & Mpu_9250::gyro | ( | void | ) | const [virtual] |
| const float & Mpu_9250::gyro_X | ( | void | ) | const [virtual] |
| const float & Mpu_9250::gyro_Y | ( | void | ) | const [virtual] |
| const float & Mpu_9250::gyro_Z | ( | void | ) | const [virtual] |
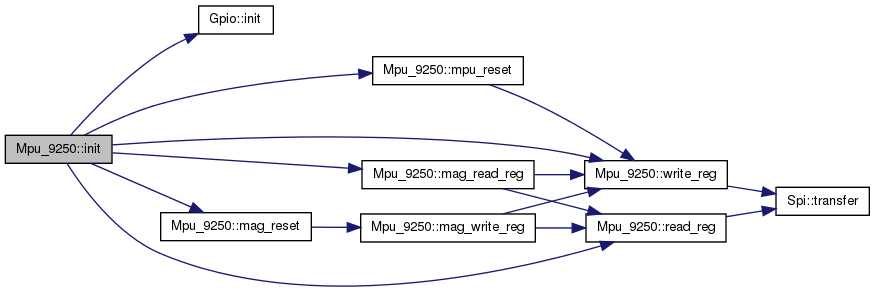
| bool Mpu_9250::init | ( | void | ) | [virtual] |
Initialise the sensor.
Sends configuration via SPI, the SPI peripheral must be activated before this method is called
Implements Accelerometer.

| const float & Mpu_9250::last_update_us | ( | void | ) | const [virtual] |
| const std::array< float, 3 > & Mpu_9250::mag | ( | void | ) | const [virtual] |
Get X, Y and Z components of magnetic field.
This is raw data, so X, Y and Z components are biased, not scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal, scaling and axis rotations
Implements Magnetometer.
| bool Mpu_9250::mag_read_reg | ( | uint8_t | reg, |
| uint8_t * | in_data | ||
| ) |
Read register from magnetometer.
| reg | Register to read from |
| in_data | Incoming data |


| bool Mpu_9250::mag_reset | ( | void | ) |
Reset magnetometer.


| bool Mpu_9250::mag_write_reg | ( | uint8_t | reg, |
| uint8_t * | out_data | ||
| ) |
Write values in register of ak8963.
| reg | Register to write to |
| out_data | Outgoing data |


| const float & Mpu_9250::mag_X | ( | void | ) | const [virtual] |
Get X component of magnetic field.
This is raw data, so X, Y and Z components are biased, not scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal, scaling and axis rotations
Implements Magnetometer.
| const float & Mpu_9250::mag_Y | ( | void | ) | const [virtual] |
Get Y component of magnetic field.
This is raw data, so X, Y and Z components are biased, not scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal, scaling and axis rotations
Implements Magnetometer.
| const float & Mpu_9250::mag_Z | ( | void | ) | const [virtual] |
Get Z component of magnetic field.
This is raw data, so X, Y and Z components are biased, not scaled, and given in the sensor frame (not in the UAV frame). Use an Imu object to handle bias removal, scaling and axis rotations
Implements Magnetometer.
| static conf_t Mpu_9250::mpu_9250_default_config | ( | ) | [inline, static] |
Default configuration for mpu 9250.
| bool Mpu_9250::mpu_reset | ( | void | ) |
Reset acc and gyro.


| bool Mpu_9250::read_reg | ( | uint8_t | reg, |
| uint8_t * | in_data, | ||
| uint32_t | nbytes = 1 |
||
| ) |
Read register of mpu 9250.
Read data at the specified register, burst read possible by specifying the number of bytes to read
| reg | Register to read from |
| in_data | Incoming data |
| nbytes | Number of bytes to read |


| const float & Mpu_9250::temperature | ( | void | ) | const [virtual] |
| bool Mpu_9250::update_acc | ( | void | ) | [virtual] |
Main update function.
Get new data from the sensor
Implements Mpu_9250_acc.

| bool Mpu_9250::write_reg | ( | uint8_t | reg, |
| uint8_t * | out_data, | ||
| uint32_t | nbytes = 1 |
||
| ) |
Write register of mpu 9250.
Write data to the specified register, burst write possible by specifying the number of bytes to write
| reg | Register to write to |
| out_data | Outgoing data |
| nbytes | Number of bytes to write |


 1.7.6.1
1.7.6.1

