|
MAV'RIC
|
|
MAV'RIC
|
Driver for servomotors using PWM. More...
#include <servo.hpp>
Public Member Functions | |
| Servo (Pwm &pwm, const servo_conf_t config=servo_default_config_standard()) | |
| Constructor. | |
| bool | init (void) |
| Initializes the servo. | |
| float | read (void) const |
| Returns the current servos value. | |
| bool | write (float value, bool to_hardware=true) |
| Sets the servos to a given value. | |
| bool | failsafe (bool to_hardware=true) |
| Sets the servos to failsafe value. | |
| bool | write_to_hardware (void) |
| Set PWM line according to the servo value. | |
| void | calibrate_esc (void) |
| Perform ESC calibration. | |
| void | set_servo_max (void) |
| Sets the maximum value to the servo. | |
| void | set_servo_min (void) |
| Sets the minimum value to the servo. | |
| float | servo_max (void) |
| Gets the maximum value to the servo. | |
| float | servo_min (void) |
| Gets the minimum value to the servo. | |
Driver for servomotors using PWM.
| Servo::Servo | ( | Pwm & | pwm, |
| const servo_conf_t | config = servo_default_config_standard() |
||
| ) |
Constructor.
| config | Configuration |
| void Servo::calibrate_esc | ( | void | ) |
Perform ESC calibration.
DO NOT USE IN FLIGHT ! Set output to max for 2 seconds, then to failsafe value

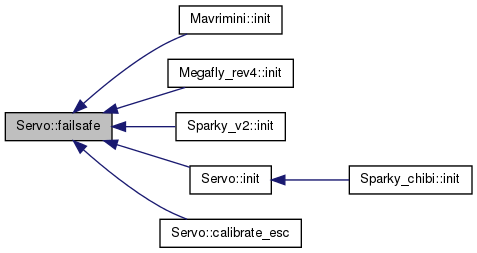
| bool Servo::failsafe | ( | bool | to_hardware = true | ) |
Sets the servos to failsafe value.
| to_hardware | Indicates if hardware peripheral should be updated (false by default) |

| bool Servo::init | ( | void | ) |
Initializes the servo.


| float Servo::read | ( | void | ) | const |
Returns the current servos value.
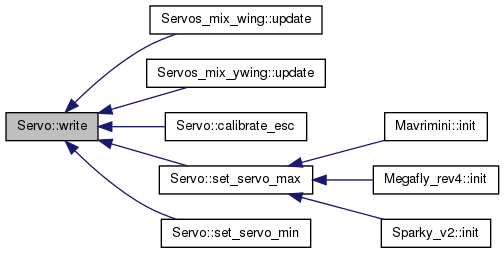
| bool Servo::write | ( | float | value, |
| bool | to_hardware = true |
||
| ) |
Sets the servos to a given value.
| value | The servo value to be set |
| to_hardware | Indicates if hardware peripheral should be updated (false by default) |

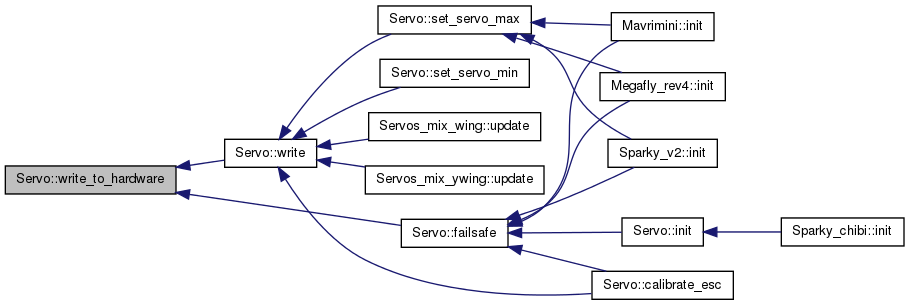
| bool Servo::write_to_hardware | ( | void | ) |
Set PWM line according to the servo value.

 1.7.6.1
1.7.6.1

