|
MAV'RIC
|
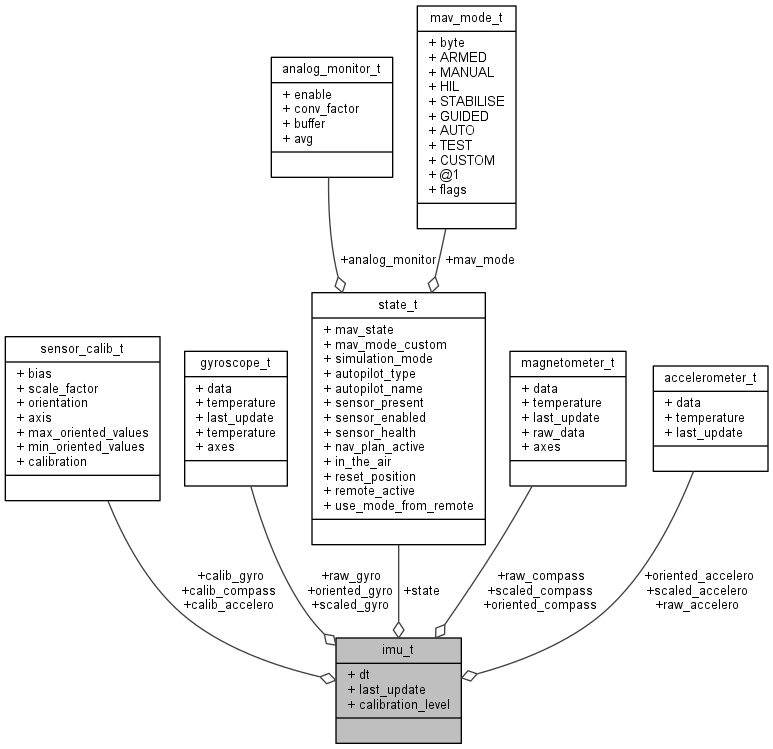
The IMU structure. More...
#include <imu.h>
Public Attributes | |
| sensor_calib_t | calib_gyro |
| The gyroscope calibration structure. | |
| sensor_calib_t | calib_accelero |
| The accelerometer calibration structure. | |
| sensor_calib_t | calib_compass |
| The compass calibration structure. | |
| gyroscope_t | raw_gyro |
| The gyroscope raw values structure. | |
| gyroscope_t | oriented_gyro |
| The gyroscope oriented values structure. | |
| gyroscope_t | scaled_gyro |
| The gyroscope scaled values structure. | |
| accelerometer_t | raw_accelero |
| The accelerometer raw values structure. | |
| accelerometer_t | oriented_accelero |
| The accelerometer oriented values structure. | |
| accelerometer_t | scaled_accelero |
| The accelerometer scaled values structure. | |
| magnetometer_t | raw_compass |
| The compass raw values structure. | |
| magnetometer_t | oriented_compass |
| The compass oriented values structure. | |
| magnetometer_t | scaled_compass |
| The compass scaled values structure. | |
| float | dt |
| The time interval between two IMU updates. | |
| uint32_t | last_update |
| The time of the last IMU update in ms. | |
| uint8_t | calibration_level |
| The level of calibration. | |
| state_t * | state |
| The pointer to the state structure. | |
The IMU structure.
 1.8.9.1
1.8.9.1

