|
MAV'RIC
|
|
MAV'RIC
|
#include <ahrs_ekf.hpp>
Classes | |
| struct | conf_t |
| The AHRS EKF config structure. More... | |
Public Member Functions | |
| AHRS_ekf (const Imu &imu, const AHRS_ekf::conf_t config=default_config()) | |
| AHRS EKF controller. | |
| bool | update (void) |
| Performs the EKF algorithm. | |
| void | calibrating_north_vector (void) |
| Performs the north vector calibration. | |
| float | last_update_s (void) const |
| Last update in seconds. | |
| bool | is_healthy (void) const |
| Indicates which estimate can be trusted. | |
| quat_t | attitude (void) const |
| Estimated attitude. | |
| std::array< float, 3 > | angular_speed (void) const |
| Estimated angular velocity. | |
| std::array< float, 3 > | linear_acceleration (void) const |
| Estimated linear acceleration. | |
Static Public Member Functions | |
| static AHRS_ekf::conf_t | default_config () |
| Default configuration structure. | |
Public Attributes | |
| conf_t | config_ |
| The config structure for the EKF module. | |
Protected Member Functions | |
| void | init_kalman (void) |
| Initialize the state and matrix of the EKF. | |
| void | predict_step (void) |
| Performs the prediction step of the EKF. | |
| void | update_step_acc (void) |
| Performs the update step with the accelerometer. | |
| void | update_step_mag (void) |
| Performs the update step with the magnetometer. | |
Protected Attributes | |
| const Imu & | imu_ |
| The Reference to the IMU structure. | |
| quat_t | attitude_ |
| Estimated attitude. | |
| std::array< float, 3 > | angular_speed_ |
| Estimated angular speed. | |
| std::array< float, 3 > | linear_acc_ |
| Estimated linear acceleration. | |
| ahrs_state_t | internal_state_ |
| Mat< 3, 3 > | R_acc_ |
| The accelerometer measruement noise matrix. | |
| Mat< 3, 3 > | R_acc_norm_ |
| The additonal accelerometer measurement noise matrix when acceleration norm is different from 1.0g. | |
| Mat< 3, 3 > | R_mag_ |
| The magnetometer measurement noise matrix. | |
| float | dt_s_ |
| Time interval since last update in seconds. | |
| float | last_update_s_ |
| Last update time in seconds. | |
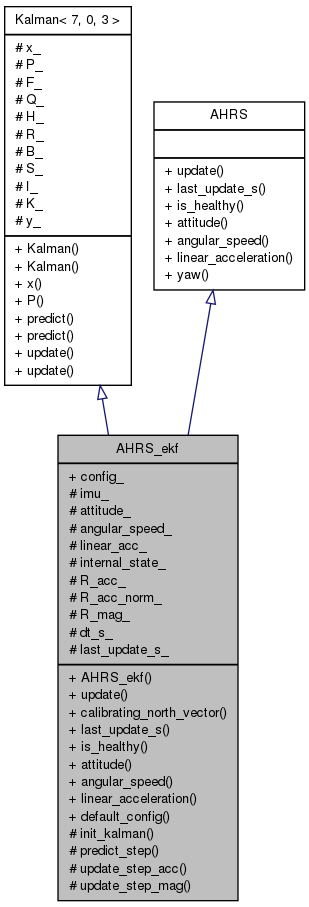
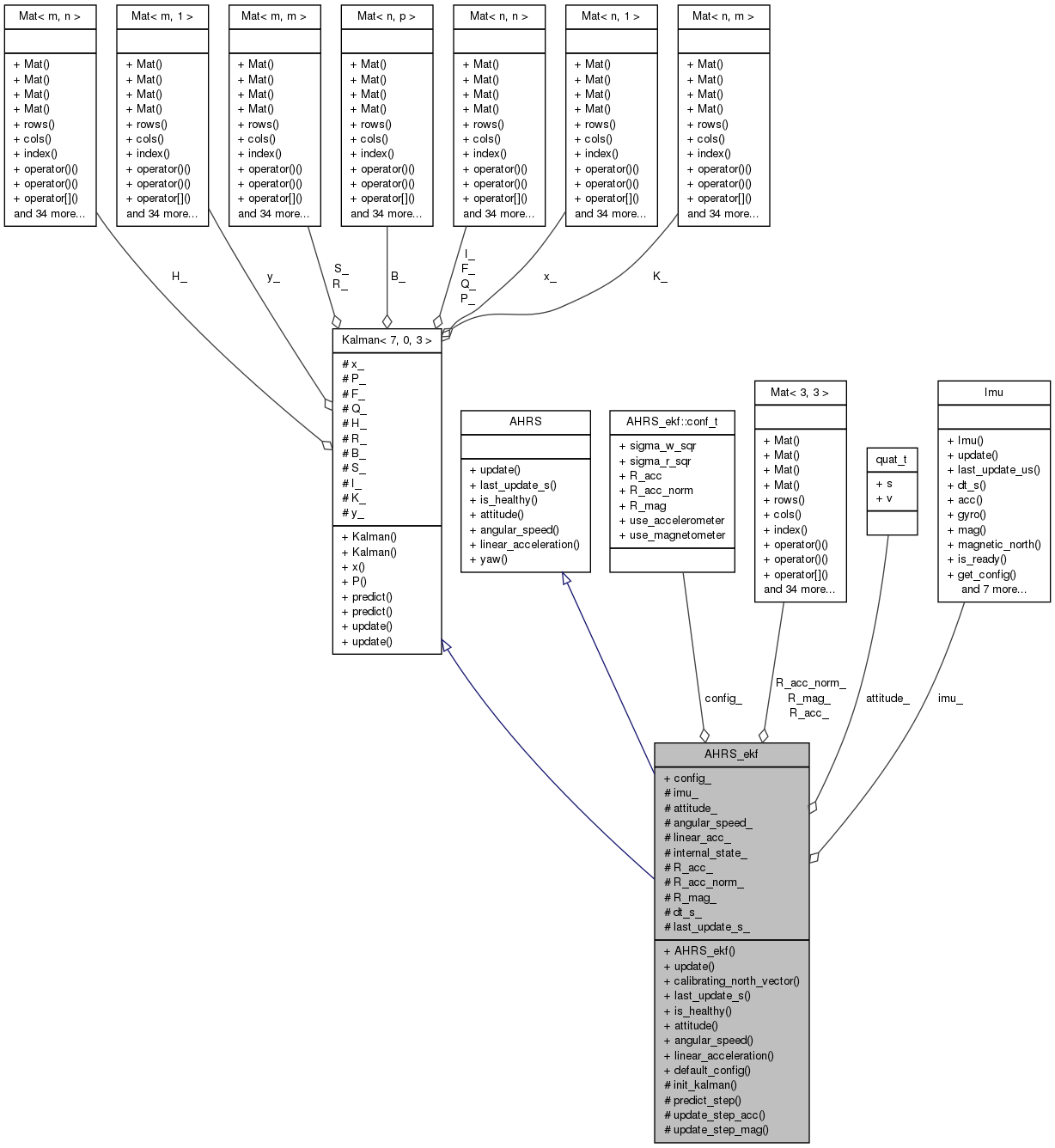
The AHRS EKF class.
| AHRS_ekf::AHRS_ekf | ( | const Imu & | imu, |
| const AHRS_ekf::conf_t | config = default_config() |
||
| ) |
AHRS EKF controller.
| imu | IMU structure (input) |
| config | Configuration structure |
| std::array< float, 3 > AHRS_ekf::angular_speed | ( | void | ) | const [virtual] |
| quat_t AHRS_ekf::attitude | ( | void | ) | const [virtual] |
| bool AHRS_ekf::is_healthy | ( | void | ) | const [virtual] |
Indicates which estimate can be trusted.
| type | Type of estimate |
Implements AHRS.
| float AHRS_ekf::last_update_s | ( | void | ) | const [virtual] |
| std::array< float, 3 > AHRS_ekf::linear_acceleration | ( | void | ) | const [virtual] |
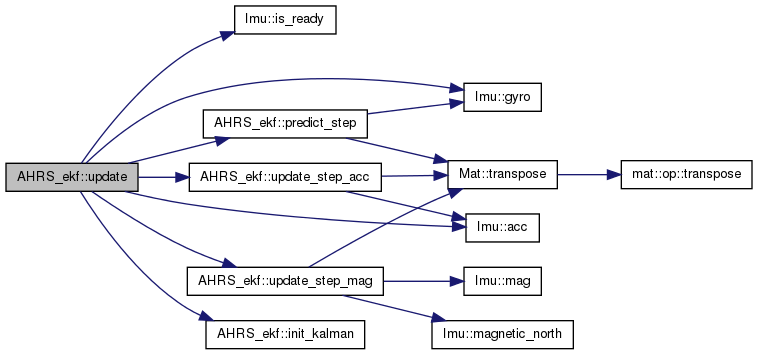
| bool AHRS_ekf::update | ( | void | ) | [virtual] |
Performs the EKF algorithm.
Implements AHRS.
 1.7.6.1
1.7.6.1

