|
MAV'RIC
|
|
MAV'RIC
|
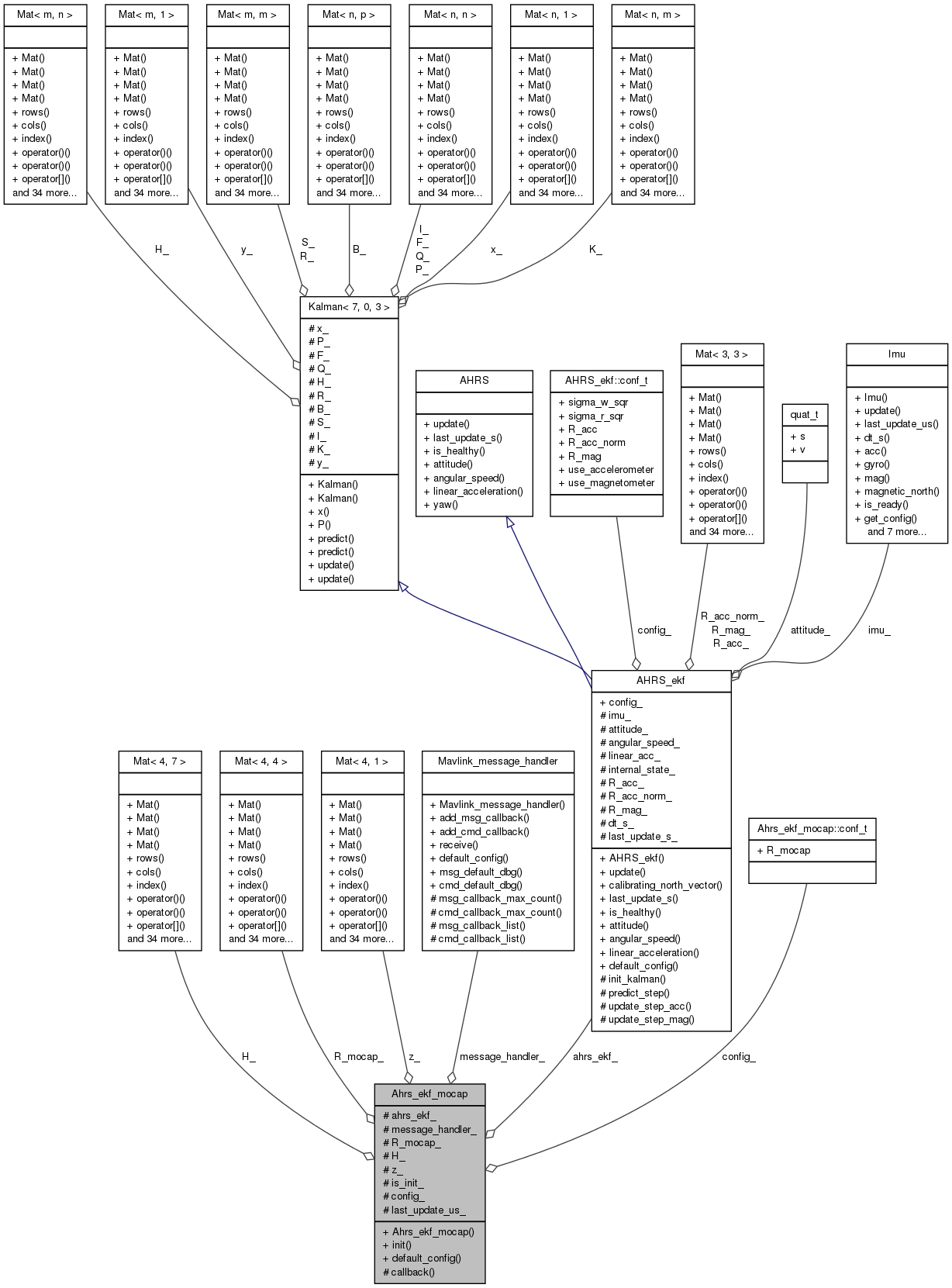
#include <ahrs_ekf_mocap.hpp>
Classes | |
| struct | conf_t |
| The AHRS EKF MOCAP config structure. More... | |
Public Member Functions | |
| Ahrs_ekf_mocap (Mavlink_message_handler &message_handler, AHRS_ekf &ahrs_ekf, const conf_t config_=Ahrs_ekf_mocap::default_config()) | |
| AHRS EKF MOCAP telemetry. | |
| bool | init () |
| Initializes the mocap telemetry message and callback. | |
Static Public Member Functions | |
| static conf_t | default_config () |
| Default configuration structure. | |
Static Protected Member Functions | |
| static void | callback (Ahrs_ekf_mocap *ahrs_ekf_mocap, uint32_t sysid, const mavlink_message_t *msg) |
| Method used to update internal state when a message is received. | |
Protected Attributes | |
| AHRS_ekf & | ahrs_ekf_ |
| AHRS extended callman filter. | |
| Mavlink_message_handler & | message_handler_ |
| State covariance. | |
| Mat< 4, 4 > | R_mocap_ |
| The mocap measurement noise matrix. | |
| Mat< 4, 7 > | H_ |
| The measurement matrix. | |
| Mat< 4, 1 > | z_ |
| The measurement vector. | |
| bool | is_init_ |
| Boolean flag stating if this module has been initialized. | |
| conf_t | config_ |
| The config structure for the EKF mocap module. | |
| float | last_update_us_ |
| The last time the mocap was updated. | |
The AHRS EKF class.
| Ahrs_ekf_mocap::Ahrs_ekf_mocap | ( | Mavlink_message_handler & | message_handler, |
| AHRS_ekf & | ahrs_ekf, | ||
| const conf_t | config_ = Ahrs_ekf_mocap::default_config() |
||
| ) |
AHRS EKF MOCAP telemetry.
| message_handler | The Mavlink message handler |
| ahrs_ekf | The reference to the ahrs_ekf object |
| config | Configuration structure for the mocap |
| void Ahrs_ekf_mocap::callback | ( | Ahrs_ekf_mocap * | ahrs_ekf_mocap, |
| uint32_t | sysid, | ||
| const mavlink_message_t * | msg | ||
| ) | [static, protected] |
Method used to update internal state when a message is received.
| ahrs_ekf_mocap | The ahrs_ekf_mocap object |
| sysid | ID of the system |
| msg | Pointer to the incoming message |

| bool Ahrs_ekf_mocap::init | ( | void | ) |
Initializes the mocap telemetry message and callback.

 1.7.6.1
1.7.6.1

