|
MAV'RIC
|
|
MAV'RIC
|
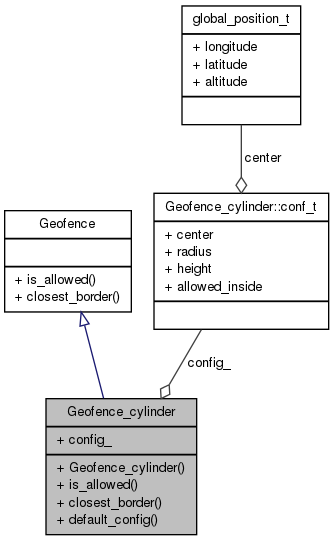
Geofence with cylindrical shape. More...
#include <geofence_cylinder.hpp>
Classes | |
| struct | conf_t |
| Configuration structure. More... | |
Public Member Functions | |
| Geofence_cylinder (conf_t config=default_config()) | |
| Constructor. | |
| bool | is_allowed (const global_position_t &position) const |
| Indicates if the position is allowed by the geofence. | |
| bool | closest_border (const global_position_t ¤t_position, global_position_t &border_position, float &distance) const |
| Computes the closest border between allowed and disallowed space. | |
Static Public Member Functions | |
| static conf_t | default_config (void) |
| Default configuration. | |
Public Attributes | |
| conf_t | config_ |
| Configuration. | |
Geofence with cylindrical shape.
| Geofence_cylinder::Geofence_cylinder | ( | conf_t | config = default_config() | ) |
Constructor.
| config | Configuration structure |
| bool Geofence_cylinder::closest_border | ( | const global_position_t & | current_position, |
| global_position_t & | border_position, | ||
| float & | distance | ||
| ) | const [virtual] |
Computes the closest border between allowed and disallowed space.
| current_position | Current position of the MAV (input) |
| border_position | Closest position at the border (output) |
| distance | Distance to closest border (output) |
Implements Geofence.

| Geofence_cylinder::conf_t Geofence_cylinder::default_config | ( | void | ) | [inline, static] |
Default configuration.
| bool Geofence_cylinder::is_allowed | ( | const global_position_t & | position | ) | const [virtual] |
Indicates if the position is allowed by the geofence.
Implements Geofence.

 1.7.6.1
1.7.6.1

