|
MAV'RIC
|
|
MAV'RIC
|
#include <mav.hpp>
Classes | |
| struct | conf_t |
| Configuration structure. More... | |
Public Types | |
|
typedef Mavlink_communication_T < N_TELEM, N_MSG_CB, N_CMD_CB, N_PARAM > | Mavlink_communication |
Public Member Functions | |
| MAV (Imu &imu, Barometer &barometer, Gps &gps, Sonar &sonar, PX4Flow &flow, Serial &serial_mavlink, Satellite &satellite, State_display &state_display, File &file_flash, Battery &battery, File &file1, File &file2, Flight_controller &flight_controller, const conf_t &config=default_config()) | |
| Constructor. | |
| virtual bool | init (void) |
| void | loop (void) |
| Main update function (infinite loop) | |
| Mavlink_communication & | get_communication () |
| Returns non-const reference to MAVLINK Communication. | |
| Scheduler & | get_scheduler () |
| Returns non-const reference to scheduler. | |
Static Public Member Functions | |
| static conf_t | default_config (uint8_t sysid=1) |
| Default configuration. | |
| static conf_t | dronedome_config (uint8_t sysid=1) |
| Configuration for use in drone dome. | |
Static Public Attributes | |
| static const uint32_t | N_TELEM = 30 |
| static const uint32_t | N_MSG_CB = 20 |
| static const uint32_t | N_CMD_CB = 20 |
| static const uint32_t | N_PARAM = 120 |
Protected Member Functions | |
| virtual bool | init_main_task (void) |
| virtual bool | init_state (void) |
| virtual bool | init_communication (void) |
| virtual bool | init_data_logging (void) |
| virtual bool | init_gps (void) |
| virtual bool | init_imu (void) |
| virtual bool | init_barometer (void) |
| virtual bool | init_sonar (void) |
| virtual bool | init_ahrs (void) |
| virtual bool | init_ins (void) |
| virtual bool | init_mocap (void) |
| virtual bool | init_flow (void) |
| virtual bool | init_controller (void)=0 |
| virtual bool | init_mission_planning (void) |
| virtual bool | init_hud (void) |
| virtual bool | init_ground_control (void) |
| virtual bool | main_task (void) |
Static Protected Member Functions | |
| static bool | main_task_func (MAV *mav) |
Protected Attributes | |
| Imu & | imu |
| Reference to IMU. | |
| Barometer & | barometer |
| Reference to barometer. | |
| Gps & | gps |
| Reference to GPS. | |
| Sonar & | sonar |
| Reference to sonar. | |
| PX4Flow & | flow |
| Optic flow sensor. | |
| Serial & | serial_mavlink |
| Reference to telemetry serial. | |
| Satellite & | satellite |
| Reference to remote control satellite. | |
| State_display & | state_display_ |
| Reference to the state display. | |
| File & | file_flash |
| Reference to flash storage. | |
| Battery & | battery |
| Reference to battery. | |
| Gps_mocap | gps_mocap |
| Position measure using mocap information. | |
| Gps_hub< 2 > | gps_hub |
| Gps hub. | |
| Ahrs_ekf_mocap | ahrs_ekf_mocap |
| Attitude measure from mocap information. | |
| Manual_control | manual_control |
| The joystick parsing structure. | |
| State | state |
| The structure with all state information. | |
| Scheduler_T< 20 > | scheduler |
| Mavlink_communication | communication |
| AHRS & | ahrs_ |
| The attitude estimation structure. | |
| AHRS_ekf | ahrs_ekf |
| AHRS_qfilter | ahrs_qfilter |
| INS & | ins_ |
| Alias for the position filter in use. | |
| INS_complementary | ins_complementary |
| The position estimaton structure. | |
| INS_kf | ins_kf |
| The Kalman INS structure, used for position estimation. | |
| Flight_controller & | flight_controller_ |
| Mavlink_waypoint_handler | waypoint_handler |
| The handler for the waypoints. | |
| Mission_handler_registry | mission_handler_registry |
| The class for registring and obtaining mission handlers. | |
| Mission_handler_hold_position | hold_position_handler |
| Mission_handler_landing | landing_handler |
| Mission_handler_navigating | navigating_handler |
| Mission_handler_on_ground | on_ground_handler |
| Mission_handler_manual | manual_ctrl_handler |
| Mission_handler_takeoff | takeoff_handler |
| Mission_handler_critical_landing | critical_landing_handler |
| Mission_handler_critical_navigating | critical_navigating_handler |
| Mission_planner | mission_planner_ |
| Controls the mission plan. | |
| Geofence_cylinder | safety_geofence_ |
| Geofence. | |
| Geofence_cylinder | emergency_geofence_ |
| Geofence. | |
| State_machine | state_machine |
| The structure for the state machine. | |
| hud_telemetry_t | hud |
| The HUD structure. | |
| servos_telemetry_t | servos_telemetry |
| Data_logging_T< 10 > | data_logging_continuous |
| Data_logging_T< 10 > | data_logging_stat |
| uint8_t | sysid_ |
| System ID. | |
| conf_t | config_ |
| Configuration. | |
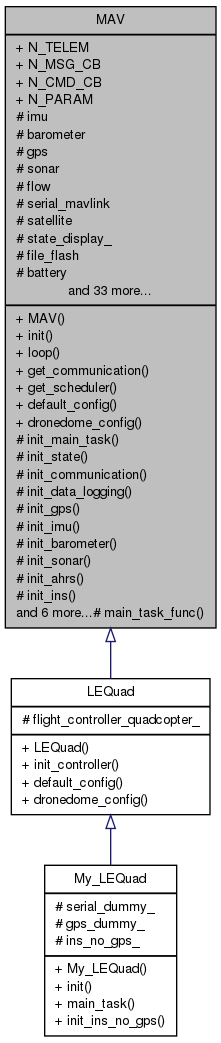
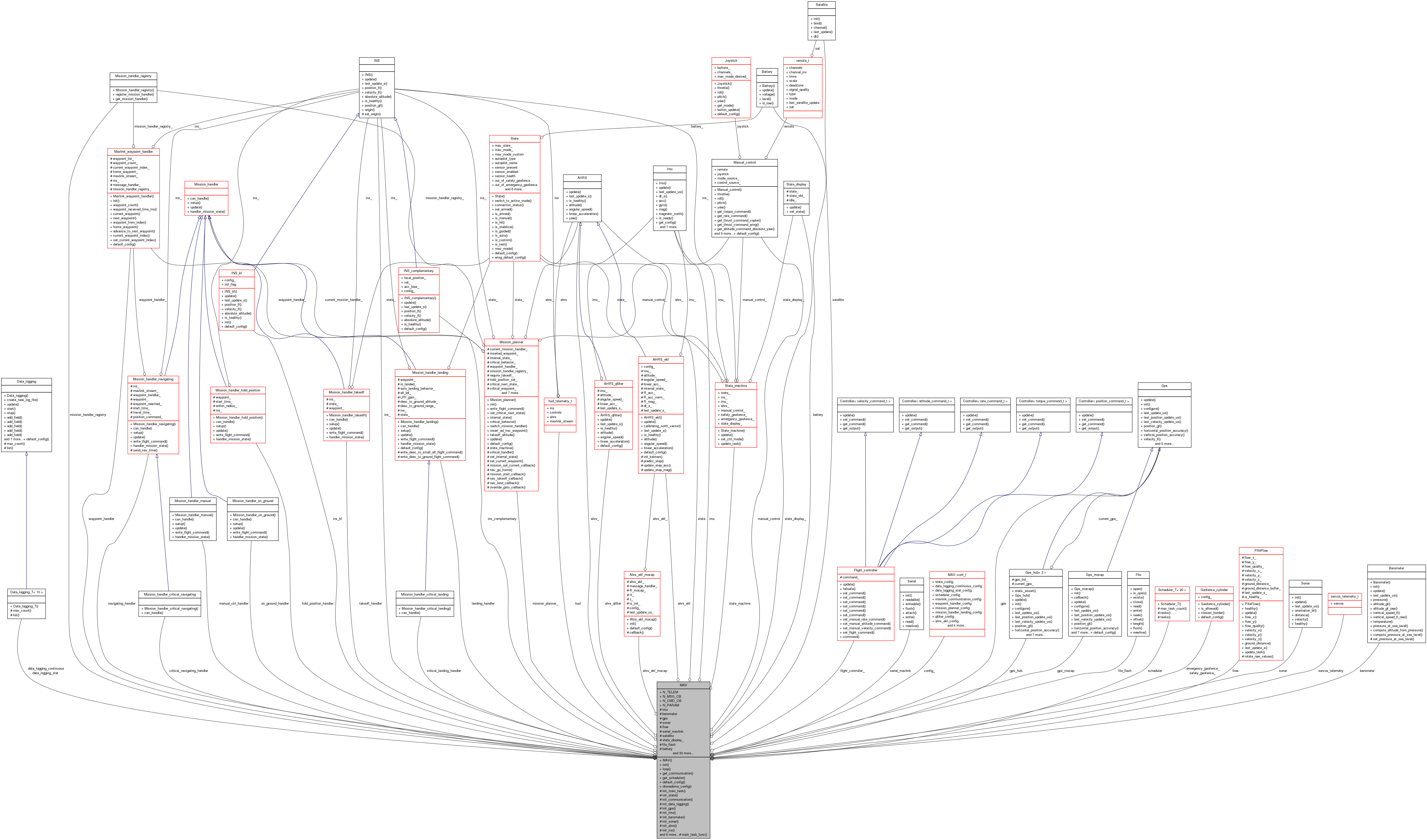
MAV class.
| MAV::conf_t MAV::default_config | ( | uint8_t | sysid = 1 | ) | [inline, static] |
Default configuration.
| sysid | System id (default value = 1) |
Reimplemented in LEQuad.


| MAV::conf_t MAV::dronedome_config | ( | uint8_t | sysid = 1 | ) | [inline, static] |
Configuration for use in drone dome.
| sysid | System id (default value = 1) |
Reimplemented in LEQuad.

| Mavlink_communication& MAV::get_communication | ( | ) | [inline] |
Returns non-const reference to MAVLINK Communication.
This is used to add simulation telemetry from the main function
| Scheduler& MAV::get_scheduler | ( | ) | [inline] |
Returns non-const reference to scheduler.
This is used to add sleep task from the main function
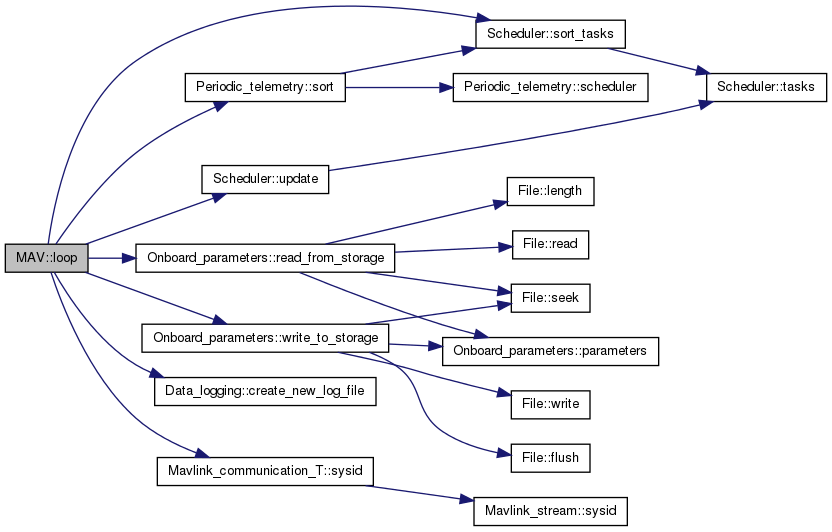
| void MAV::loop | ( | void | ) |
Main update function (infinite loop)
Performs last operations before flight, then loops on scheduler updates
 1.7.6.1
1.7.6.1

