List of all members.
Constructor & Destructor Documentation
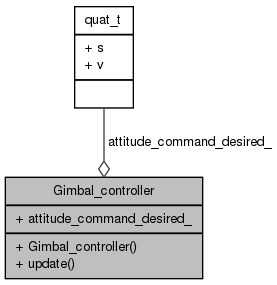
Constructor.
- Parameters:
-
| servo_pitch | Servo for pitch |
| servo_yaw | Servo for yaw |
| config | Configuration structure |
Member Function Documentation
Main update function - sends gimbal command to two PWM outputs (for pitch and yaw)
- Returns:
- success
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/control/unsupported/gimbal_controller.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/control/unsupported/gimbal_controller.cpp
 1.7.6.1
1.7.6.1

