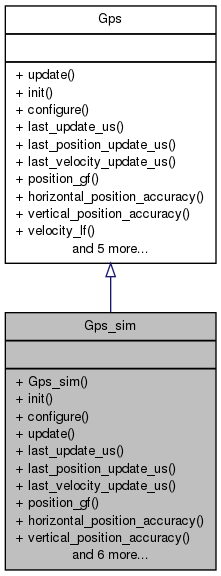
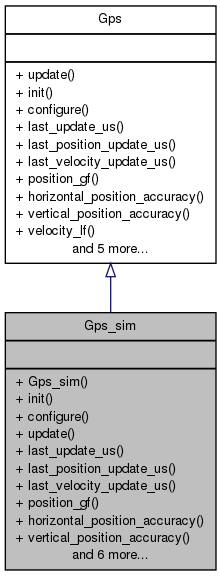
Simulation for GPS.
More...
#include <gps_sim.hpp>
List of all members.
Detailed Description
Constructor & Destructor Documentation
Constructor.
- Parameters:
-
| dynamic_model | Reference to dynamic model |
Member Function Documentation
Indicates whether fix are received.
- Returns:
- Value
Implements Gps.
Get heading in degrees.
- Returns:
- heading
Implements Gps.
Get heading accuracy in degrees.
- Returns:
- accuracy
Implements Gps.
Indicates whether the measurements can be trusted.
- Returns:
- Value
Implements Gps.
Get horizontal position accuracy in m.
- Returns:
- accuracy
Implements Gps.
Initializes the gps.
- Returns:
- Success
Implements Gps.
Get last position update time in microseconds.
- Returns:
- Update time
Implements Gps.
Get last update time in microseconds.
- Returns:
- Update time
Implements Gps.
Get last velocity update time in microseconds.
- Returns:
- Update time
Implements Gps.
Get the number of satellites.
- Returns:
- Value
Implements Gps.
Get position in global frame.
- Returns:
- position
Implements Gps.
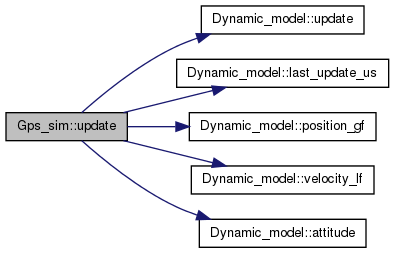
Main update function Reads new values from sensor.
- Returns:
- Success
Implements Gps.
Get velocity accuracy in m/s.
- Returns:
- velocity accuracy
Implements Gps.
Get velocity in local frame in m/s.
- Returns:
- 3D velocity
Implements Gps.
Get vertical position accuracy in m.
- Returns:
- accuracy
Implements Gps.
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/simulation/gps_sim.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/simulation/gps_sim.cpp
 1.7.6.1
1.7.6.1

