|
MAV'RIC
|
|
MAV'RIC
|
Onboard parameters base class. More...
#include <onboard_parameters.hpp>
Classes | |
| struct | conf_t |
| Configuration for the module onboard parameters. More... | |
| struct | param_entry_t |
| Structure of onboard parameter. More... | |
Public Member Functions | |
| Onboard_parameters (File &file, const State &state, Mavlink_message_handler &message_handler, const Mavlink_stream &mavlink_stream, const conf_t &config) | |
| Constructor: Initialisation of the Parameter_Set structure by setting the number of onboard parameter to 0. | |
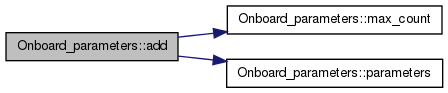
| bool | add (uint32_t *val, const char *param_name) |
| Register parameter in the internal parameter list that gets published to MAVlink. | |
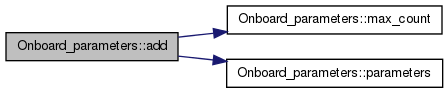
| bool | add (int32_t *val, const char *param_name) |
| Register parameter in the internal parameter list that gets published to MAVlink. | |
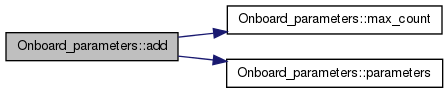
| bool | add (float *val, const char *param_name) |
| Registers parameter in the internal parameter list that gets published to MAVlink. | |
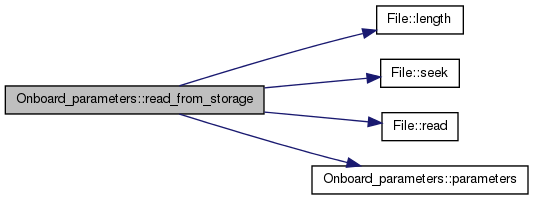
| bool | read_from_storage () |
| Read onboard parameters from the file storage. | |
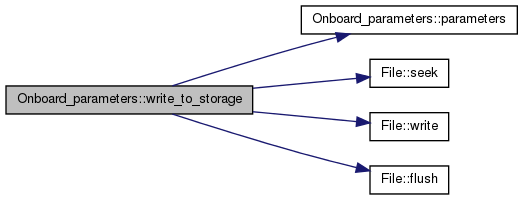
| bool | write_to_storage () |
| Write onboard parameters to the file storage. | |
| bool | send_first_scheduled_parameter (void) |
| Searches through the list of parameters, and send only the first scheduled parameter. | |
Static Public Member Functions | |
| static conf_t | default_config (void) |
| Default configuration. | |
Protected Member Functions | |
| virtual uint32_t | max_count (void)=0 |
| Get maximum number of parameters. | |
| virtual param_entry_t * | parameters (void)=0 |
| Get pointer to the list of parameters. | |
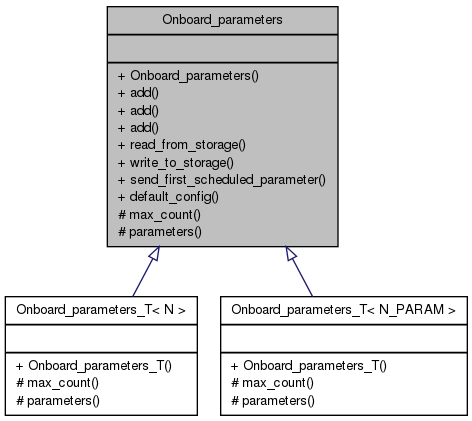
Onboard parameters base class.
This class is abstract and does not contains the task list, use the child class Onboard_parameters_T
| Onboard_parameters::Onboard_parameters | ( | File & | file, |
| const State & | state, | ||
| Mavlink_message_handler & | message_handler, | ||
| const Mavlink_stream & | mavlink_stream, | ||
| const conf_t & | config | ||
| ) |
Constructor: Initialisation of the Parameter_Set structure by setting the number of onboard parameter to 0.
| file | Pointer to file storage |
| state | Pointer to the state structure |
| message_handler | Pointer to MAVLink message handler |
| mavlink_stream | Pointer to MAVLink stream |
| config | Configuration |

| bool Onboard_parameters::add | ( | uint32_t * | val, |
| const char * | param_name | ||
| ) |
Register parameter in the internal parameter list that gets published to MAVlink.
| val | Unsigned 32 - bits integer parameter value |
| param_name | Name of the parameter |
| bool Onboard_parameters::add | ( | int32_t * | val, |
| const char * | param_name | ||
| ) |
Register parameter in the internal parameter list that gets published to MAVlink.
| val | Signed 32 - bits integer parameter value |
| param_name | Name of the parameter |
| bool Onboard_parameters::add | ( | float * | val, |
| const char * | param_name | ||
| ) |
Registers parameter in the internal parameter list that gets published to MAVlink.
| val | Floating point parameter value |
| param_name | Name of the parameter |
| Onboard_parameters::conf_t Onboard_parameters::default_config | ( | void | ) | [inline, static] |
Default configuration.
| virtual uint32_t Onboard_parameters::max_count | ( | void | ) | [protected, pure virtual] |
Get maximum number of parameters.
Abstract method to be implemented in child classes
Implemented in Onboard_parameters_T< N >, and Onboard_parameters_T< N_PARAM >.

| virtual param_entry_t* Onboard_parameters::parameters | ( | void | ) | [protected, pure virtual] |
Get pointer to the list of parameters.
Abstract method to be implemented in child classes
Implemented in Onboard_parameters_T< N >, and Onboard_parameters_T< N_PARAM >.

Read onboard parameters from the file storage.

| bool Onboard_parameters::send_first_scheduled_parameter | ( | void | ) |
Searches through the list of parameters, and send only the first scheduled parameter.


| bool Onboard_parameters::write_to_storage | ( | ) |
Write onboard parameters to the file storage.

 1.7.6.1
1.7.6.1

