|
MAV'RIC
|
|
MAV'RIC
|
Required arguments. More...
#include <velocity_controller.hpp>
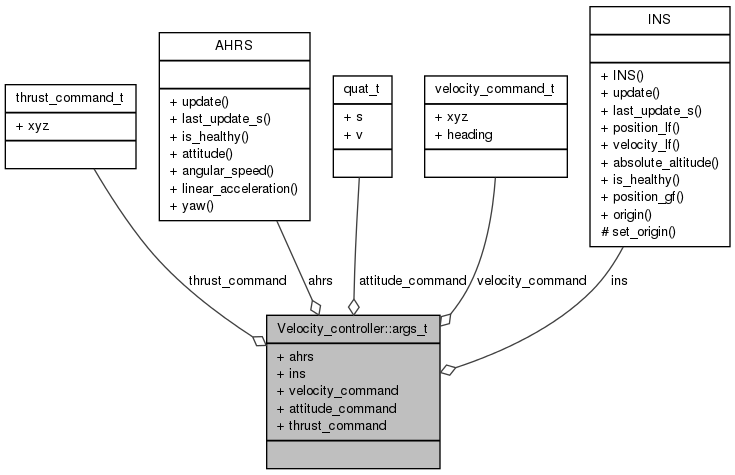
Public Attributes | |
| const AHRS & | ahrs |
| Pointer to attitude estimation (input) | |
| const INS & | ins |
| Speed and position estimation (input) | |
| velocity_command_t & | velocity_command |
| Velocity command (input) | |
| attitude_command_t & | attitude_command |
| Attitude command (output) | |
| thrust_command_t & | thrust_command |
| Thrust command (output) | |
Required arguments.
 1.7.6.1
1.7.6.1

