|
MAV'RIC
|
|
MAV'RIC
|
P^2 Attitude controller structure. More...
#include <attitude_controller_p2.hpp>
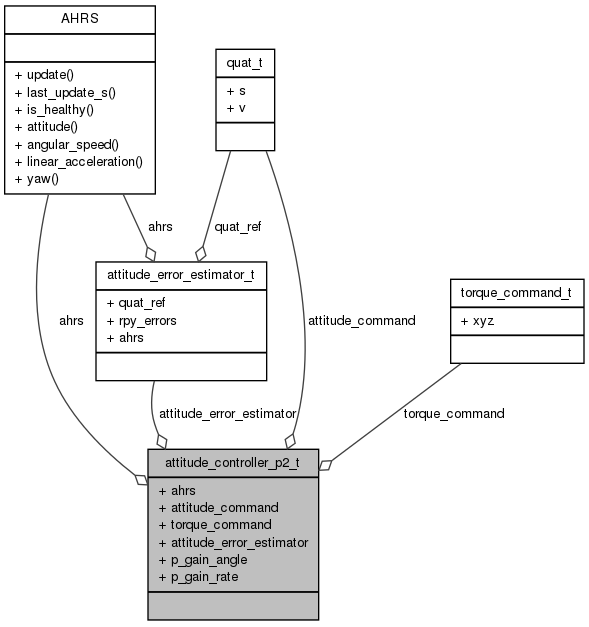
Public Attributes | |
| const AHRS * | ahrs |
| Pointer to attitude estimation (input) | |
| const attitude_command_t * | attitude_command |
| Pointer to attitude command (input) | |
| torque_command_t * | torque_command |
| Pointer to torque command (output) | |
| attitude_error_estimator_t | attitude_error_estimator |
| Attitude error estimator. | |
| float | p_gain_angle [3] |
| Proportionnal gain for angular errors. | |
| float | p_gain_rate [3] |
| Proportionnal gain applied to gyros rates. | |
P^2 Attitude controller structure.
 1.7.6.1
1.7.6.1

