|
MAV'RIC
|
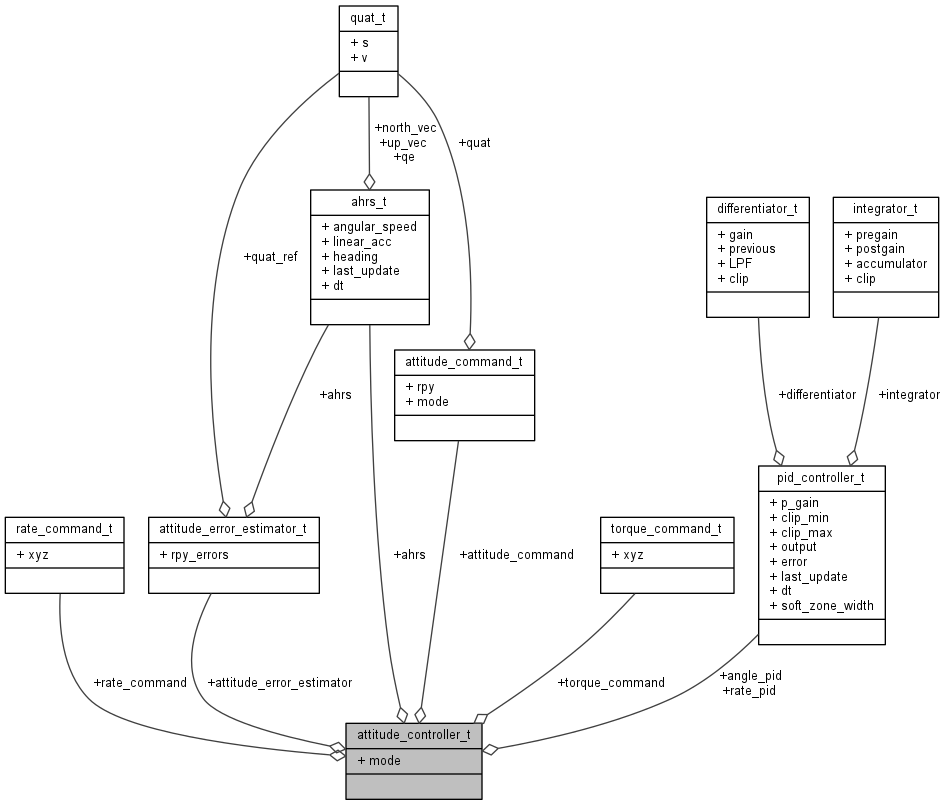
Attitude controller structure. More...
#include <attitude_controller.h>
Public Attributes | |
| attitude_error_estimator_t | attitude_error_estimator |
| Attitude error estimator. | |
| pid_controller_t | rate_pid [3] |
| Angular rate PID controller for roll, pitch and yaw. | |
| pid_controller_t | angle_pid [3] |
| Attitude PID controller for roll, pitch and yaw. | |
| attitude_controller_mode_t | mode |
| Control mode: Angle (default), or rate. | |
| const ahrs_t * | ahrs |
| Pointer to attitude estimation (input) | |
| const attitude_command_t * | attitude_command |
| Pointer to attitude command (input) | |
| rate_command_t * | rate_command |
| Pointer to rate command (input/output) | |
| torque_command_t * | torque_command |
| Pointer to torque command (output) | |
Attitude controller structure.
 1.8.9.1
1.8.9.1

