|
MAV'RIC
|
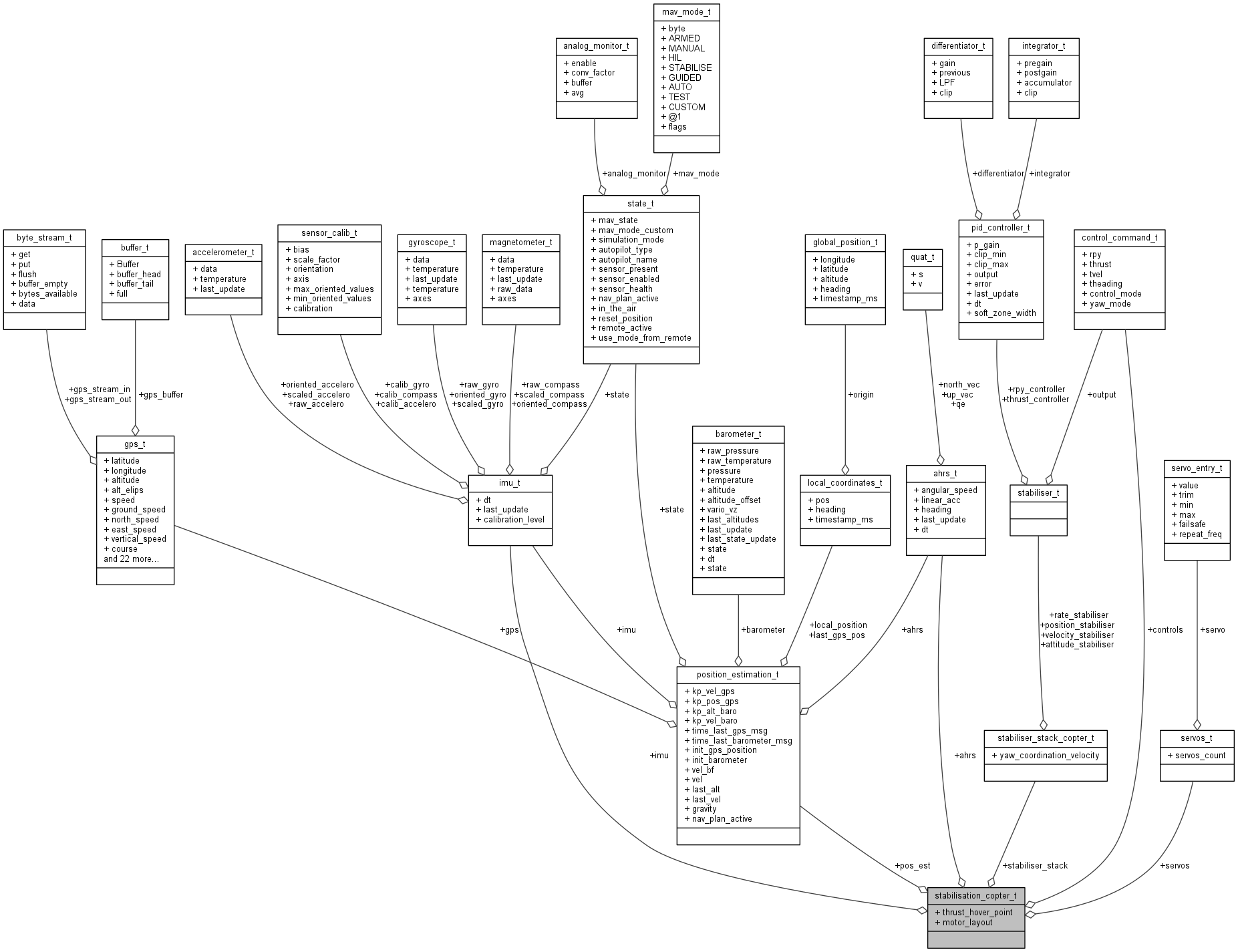
Structure containing the pointers to the data needed in this module. More...
#include <stabilisation_copter.h>
Public Attributes | |
| float | thrust_hover_point |
| The hover point of the thrust. | |
| quadcopter_motor_layout_t | motor_layout |
| Motor layout (cross or diag) | |
| stabiliser_stack_copter_t | stabiliser_stack |
| The pointer to the PID parameters values for the stacked controller. | |
| control_command_t * | controls |
| The pointer to the control structure. | |
| const imu_t * | imu |
| The pointer to the IMU structure. | |
| const ahrs_t * | ahrs |
| The pointer to the attitude estimation structure. | |
| const position_estimation_t * | pos_est |
| The pointer to the position estimation structure. | |
| servos_t * | servos |
| The pointer to the servos structure. | |
Structure containing the pointers to the data needed in this module.
 1.8.9.1
1.8.9.1

