|
MAV'RIC
|
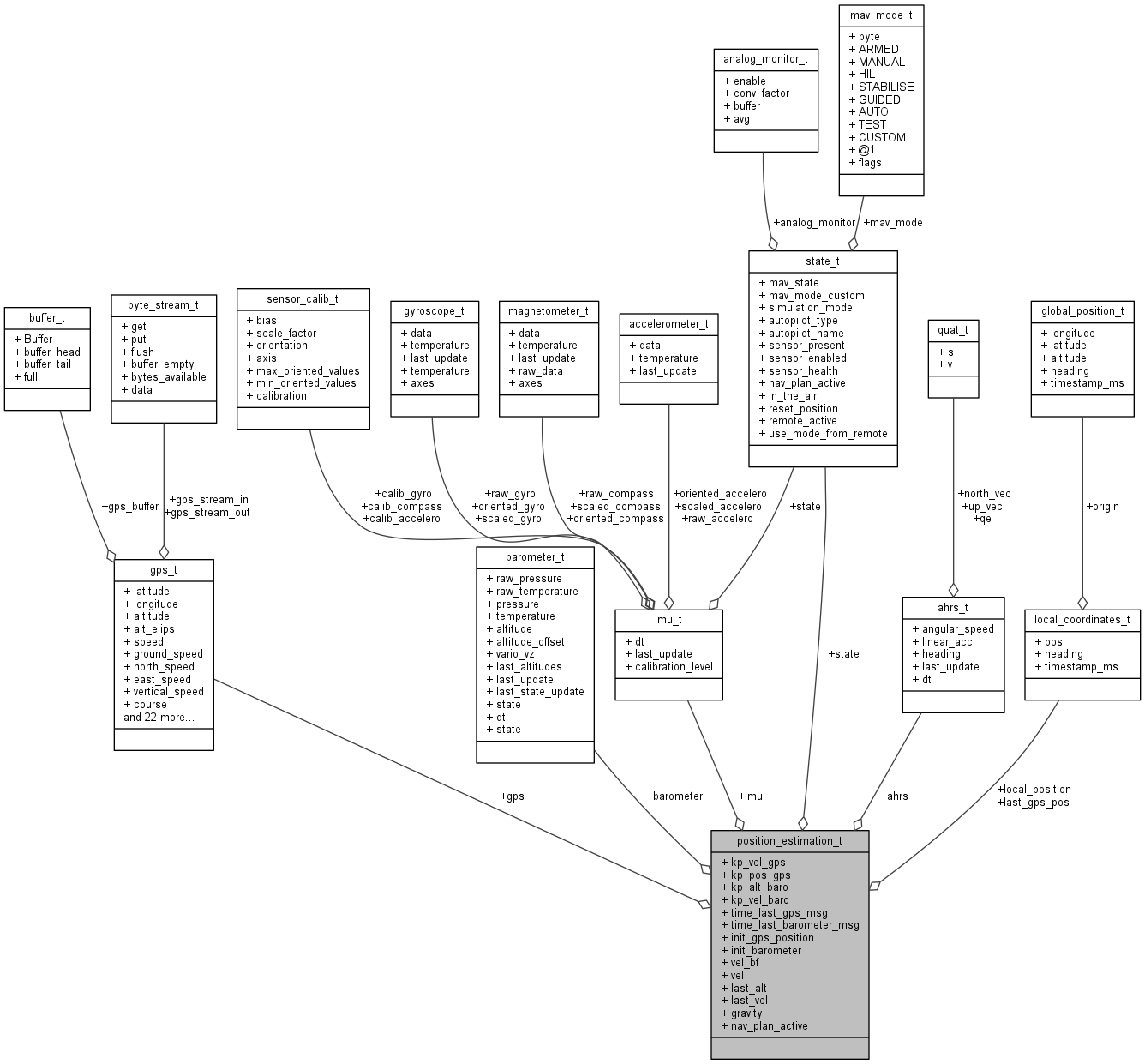
The position estimator structure. More...
#include <position_estimation.h>
Public Attributes | |
| float | kp_vel_gps [3] |
| The gain to correct the velocity estimation from the GPS. | |
| float | kp_pos_gps [3] |
| The gain to correct the position estimation from the GPS. | |
| float | kp_alt_baro |
| The gain to correct the Z position estimation from the barometer. | |
| float | kp_vel_baro |
| The gain to correct the position estimation from the barometer. | |
| uint32_t | time_last_gps_msg |
| The time at which we received the last GPS message in ms. | |
| uint32_t | time_last_barometer_msg |
| The time at which we received the last barometer message in ms. | |
| bool | init_gps_position |
| The boolean flag ensuring that the GPS was initialized. | |
| bool | init_barometer |
| The boolean flag ensuring that the barometer was initialized. | |
| float | vel_bf [3] |
| The 3D velocity in body frame. | |
| float | vel [3] |
| The 3D velocity in global frame. | |
| float | last_alt |
| The value of the last altitude estimation. | |
| float | last_vel [3] |
| The last 3D velocity. | |
| local_coordinates_t | local_position |
| The local position. | |
| local_coordinates_t | last_gps_pos |
| The coordinates of the last GPS position. | |
| float | gravity |
| The value of the gravity. | |
| barometer_t * | barometer |
| The pointer to the barometer structure. | |
| const gps_t * | gps |
| The pointer to the GPS structure. | |
| const ahrs_t * | ahrs |
| The pointer to the attitude estimation structure. | |
| const imu_t * | imu |
| The pointer to the IMU structure. | |
| state_t * | state |
| The pointer to the state structure. | |
| bool * | nav_plan_active |
| The pointer to the waypoint set flag. | |
The position estimator structure.
 1.8.9.1
1.8.9.1

