|
MAV'RIC
|
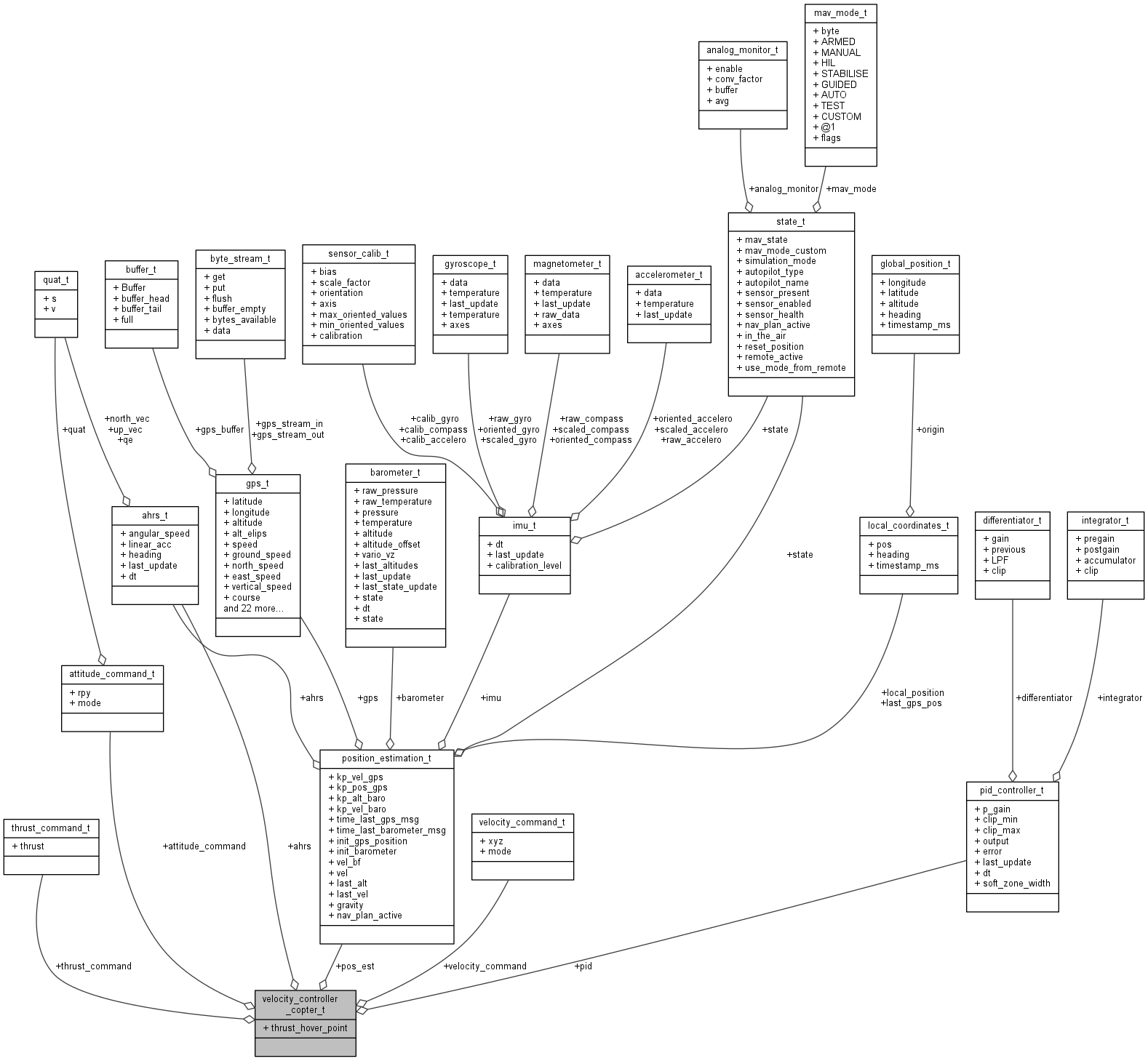
Velocity controller structure. More...
#include <velocity_controller_copter.h>
Public Attributes | |
| pid_controller_t | pid [3] |
| PID controller for velocity along X, Y and Z in global frame. | |
| float | thrust_hover_point |
| Amount of thrust required to hover (between -1 and 1) | |
| const ahrs_t * | ahrs |
| Pointer to attitude estimation (input) | |
| const position_estimation_t * | pos_est |
| Speed and position estimation (input) | |
| const velocity_command_t * | velocity_command |
| Pointer to velocity command (input) | |
| attitude_command_t * | attitude_command |
| Pointer to attitude command (output) | |
| thrust_command_t * | thrust_command |
| Pointer to thrust command (output) | |
Velocity controller structure.
 1.8.9.1
1.8.9.1

