|
MAV'RIC
|
|
MAV'RIC
|
#include <ahrs_madgwick.hpp>
Classes | |
| struct | conf_t |
| Configuration for ahrs _madgwick. More... | |
Public Member Functions | |
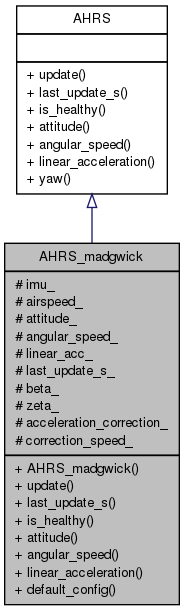
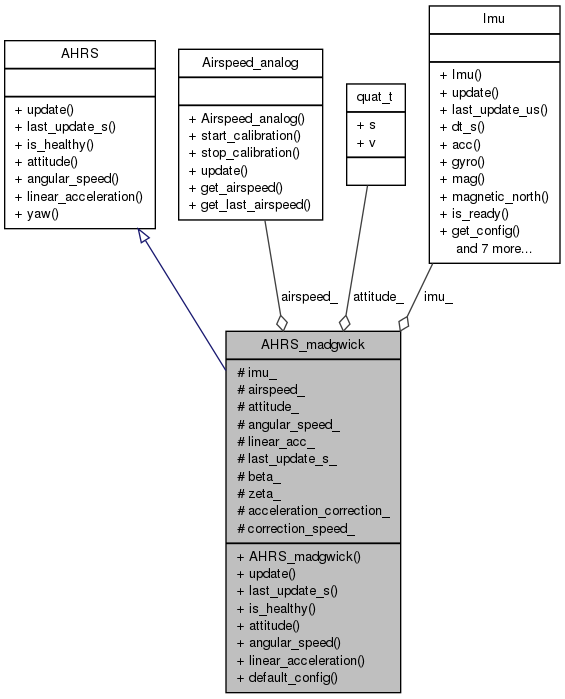
| AHRS_madgwick (const Imu &imu, const Airspeed_analog &airspeed, const conf_t &config=default_config()) | |
| Init function. | |
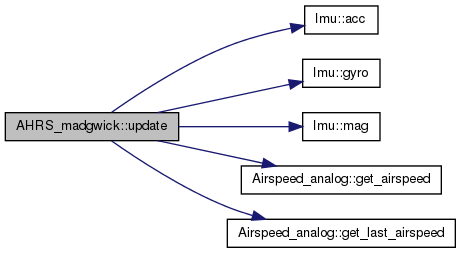
| bool | update (void) |
| Main update function. | |
| float | last_update_s (void) const |
| Last update in seconds. | |
| bool | is_healthy (void) const |
| Indicates which estimate can be trusted. | |
| quat_t | attitude (void) const |
| Estimated attitude. | |
| std::array< float, 3 > | angular_speed (void) const |
| Estimated angular velocity. | |
| std::array< float, 3 > | linear_acceleration (void) const |
| Estimated linear acceleration. | |
Static Public Member Functions | |
| static conf_t | default_config () |
| Default configuration. | |
Protected Attributes | |
| const Imu & | imu_ |
| Reference to IMU sensors. | |
| const Airspeed_analog & | airspeed_ |
| Reference to the airspeed sensor. | |
| quat_t | attitude_ |
| Estimated attitude. | |
| std::array< float, 3 > | angular_speed_ |
| Estimated angular speed. | |
| std::array< float, 3 > | linear_acc_ |
| Estimated linear acceleration. | |
| float | last_update_s_ |
| Last update time. | |
| float | beta_ |
| 2 * proportional gain (Kp) | |
| float | zeta_ |
| Gyro drift bias gain. | |
| uint32_t | acceleration_correction_ |
| Enable the correction of the parasitic accelerations ? | |
| float | correction_speed_ |
| Airspeed from which the correction should start. | |
Disclaimer: this WIP
| AHRS_madgwick::AHRS_madgwick | ( | const Imu & | imu, |
| const Airspeed_analog & | airspeed, | ||
| const conf_t & | config = default_config() |
||
| ) |
Init function.
| imu | Reference to IMU structure |
| airspeed | Reference to airspeed sensor |
| config | Config structure |
| std::array< float, 3 > AHRS_madgwick::angular_speed | ( | void | ) | const [virtual] |
| quat_t AHRS_madgwick::attitude | ( | void | ) | const [virtual] |
| bool AHRS_madgwick::is_healthy | ( | void | ) | const [virtual] |
Indicates which estimate can be trusted.
| type | Type of estimate |
Implements AHRS.
| float AHRS_madgwick::last_update_s | ( | void | ) | const [virtual] |
| std::array< float, 3 > AHRS_madgwick::linear_acceleration | ( | void | ) | const [virtual] |
| bool AHRS_madgwick::update | ( | void | ) | [virtual] |
 1.7.6.1
1.7.6.1