List of all members.
Member Enumeration Documentation
- Enumerator:
| POS_XYZ |
3D position control
|
| POS_XY_VEL_Z |
Horizontal position control + vertical velocity control.
|
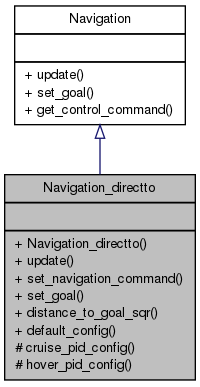
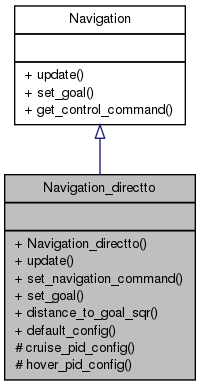
Member Function Documentation
Default configuration.
- Returns:
- config
Sets the 3D position command.
Override of position_controller func; Sets pos controller pid to std_pid_config_ and calls parent class method
- Parameters:
-
| command | xyz position command indicating target location in local frame |
- Returns:
- success whether command was accepted sets the horizontal position & vertical velocity command
Override of position_controller func; Sets pos controller pid to std_pid_config_ and calls parent class method
- Parameters:
-
| command | xy position z velocity command indicating target location & velocity in local frame |
- Returns:
- success whether command was accepted returns the distance to the goal squared
updated in calc_position_command()
- Returns:
- success whether command was accepted
Sets the navigation goal (desired position)
- Parameters:
-
- Returns:
- success whether command was accepted
Implements Navigation.
sets the navigation command (desired position)
- Parameters:
-
| command | navigation command indicating navigation target location in local frame |
- Returns:
- success whether command was accepted
The documentation for this class was generated from the following files:
- /home/travis/build/lis-epfl/MAVRIC_Library/navigation/navigation_directto.hpp
- /home/travis/build/lis-epfl/MAVRIC_Library/navigation/navigation_directto.cpp
 1.7.6.1
1.7.6.1

