|
MAV'RIC
|
|
MAV'RIC
|
Public Member Functions | |
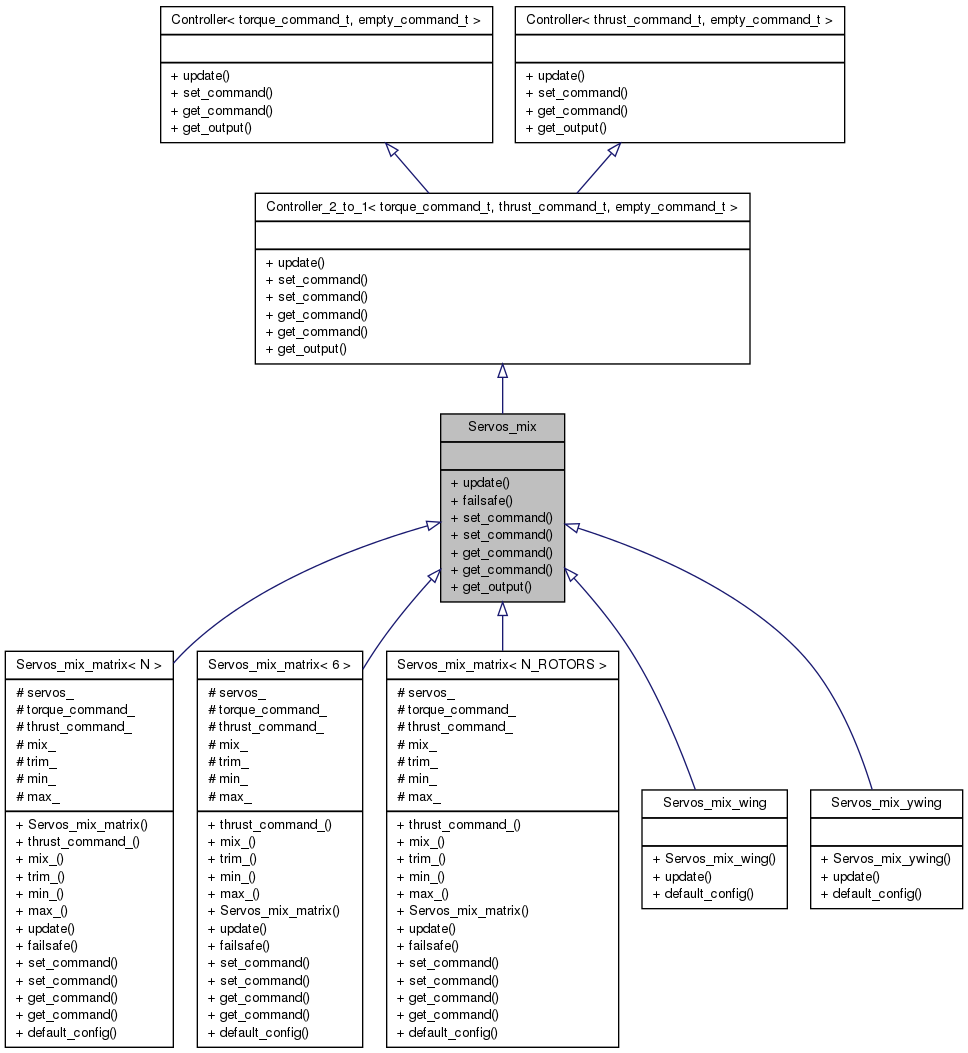
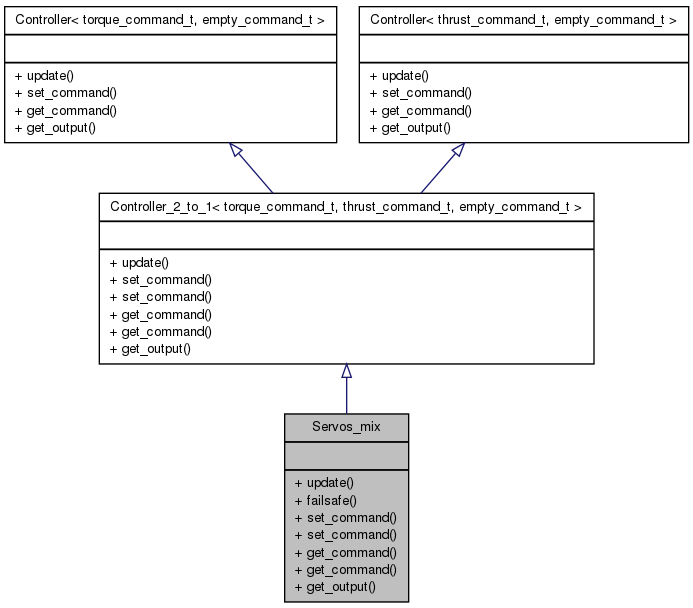
| virtual bool | update ()=0 |
| Main update function. | |
| virtual bool | failsafe ()=0 |
| virtual bool | set_command (const torque_command_t &torque)=0 |
| sets the torque command | |
| virtual bool | set_command (const thrust_command_t &thrust)=0 |
| sets the thrust command | |
| virtual bool | get_command (torque_command_t &torque) const =0 |
| sets the torque command | |
| virtual bool | get_command (thrust_command_t &thrust) const =0 |
| sets the thrust command | |
| virtual bool | get_output (empty_command_t &command) const |
| Returns the output command. | |
| virtual bool Servos_mix::get_command | ( | torque_command_t & | torque | ) | const [pure virtual] |
sets the torque command
| command | torque command in body frame |
Implements Controller_2_to_1< torque_command_t, thrust_command_t, empty_command_t >.
Implemented in Servos_mix_matrix< N >, Servos_mix_matrix< N_ROTORS >, and Servos_mix_matrix< 6 >.

| virtual bool Servos_mix::get_command | ( | thrust_command_t & | thrust | ) | const [pure virtual] |
sets the thrust command
| command | thrust command in body frame |
Implements Controller_2_to_1< torque_command_t, thrust_command_t, empty_command_t >.
Implemented in Servos_mix_matrix< N >, Servos_mix_matrix< N_ROTORS >, and Servos_mix_matrix< 6 >.
| virtual bool Servos_mix::get_output | ( | empty_command_t & | command | ) | const [inline, virtual] |
Returns the output command.
| command | output command |
Implements Controller_2_to_1< torque_command_t, thrust_command_t, empty_command_t >.
| virtual bool Servos_mix::set_command | ( | const torque_command_t & | torque | ) | [pure virtual] |
sets the torque command
| command | torque command in body frame |
Implements Controller_2_to_1< torque_command_t, thrust_command_t, empty_command_t >.
Implemented in Servos_mix_matrix< N >, Servos_mix_matrix< N_ROTORS >, and Servos_mix_matrix< 6 >.

| virtual bool Servos_mix::set_command | ( | const thrust_command_t & | thrust | ) | [pure virtual] |
sets the thrust command
| command | thrust command in body frame |
Implements Controller_2_to_1< torque_command_t, thrust_command_t, empty_command_t >.
Implemented in Servos_mix_matrix< N >, Servos_mix_matrix< N_ROTORS >, and Servos_mix_matrix< 6 >.
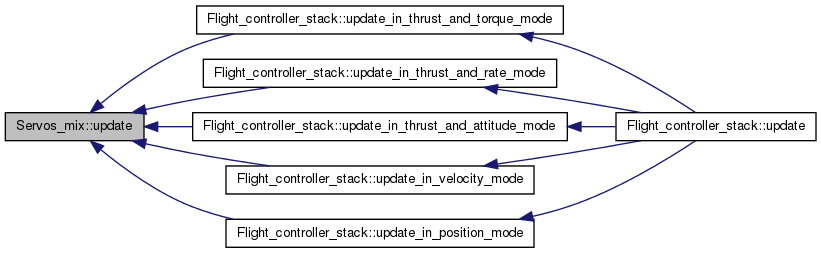
| virtual bool Servos_mix::update | ( | void | ) | [pure virtual] |
Main update function.
Implements Controller_2_to_1< torque_command_t, thrust_command_t, empty_command_t >.
Implemented in Servos_mix_matrix< N >, Servos_mix_matrix< N_ROTORS >, Servos_mix_matrix< 6 >, Servos_mix_wing, and Servos_mix_ywing.
 1.7.6.1
1.7.6.1

