|
MAV'RIC
|
|
MAV'RIC
|
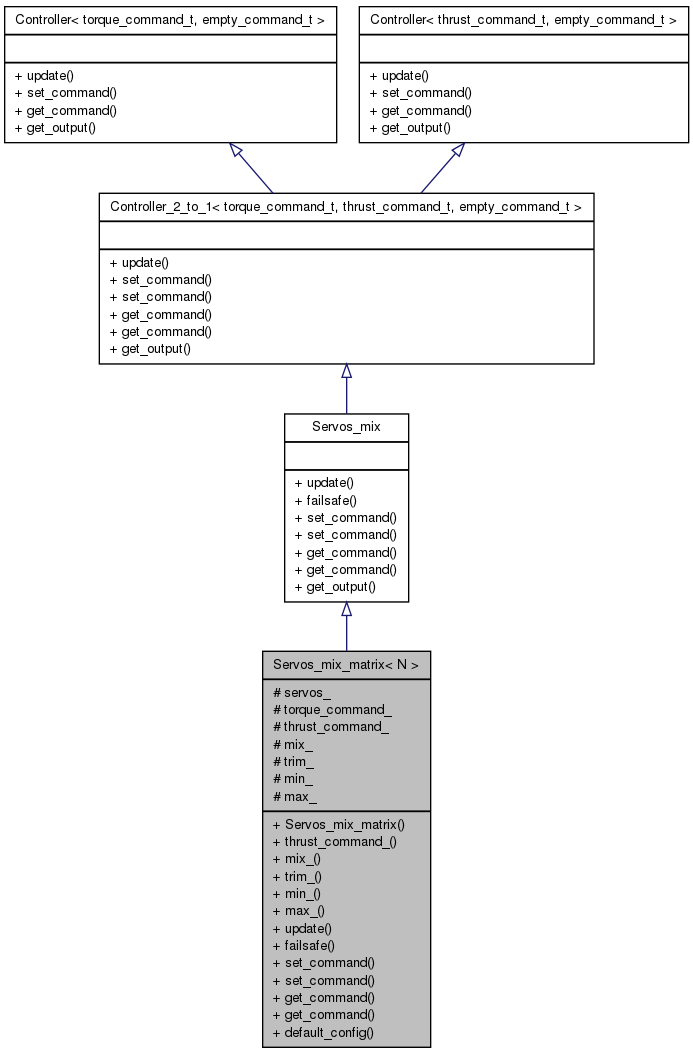
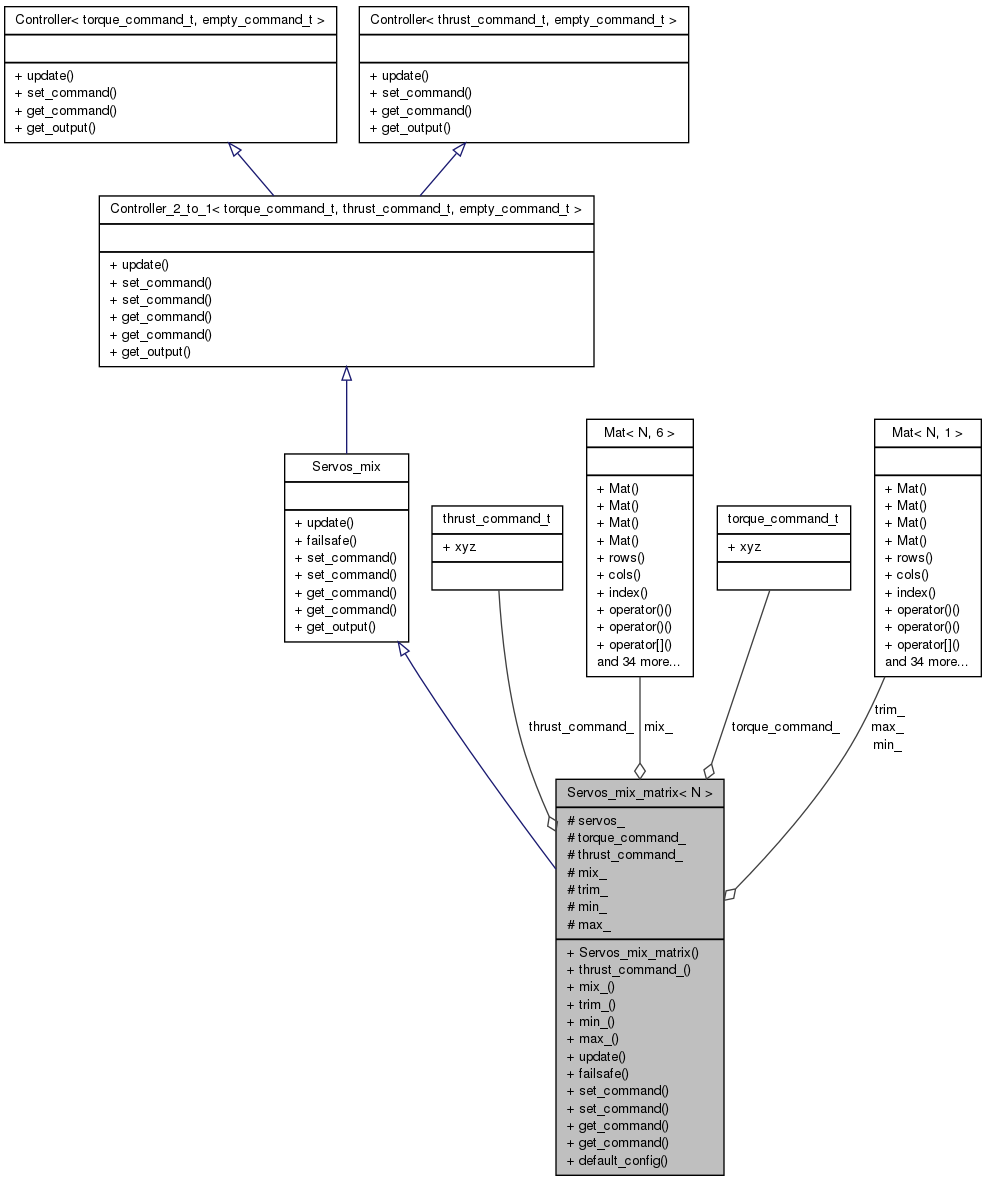
Servos mix. More...
#include <servos_mix_matrix.hpp>
Classes | |
| struct | args_t |
| Required arguments. More... | |
| struct | conf_t |
| Configuration structure. More... | |
Public Member Functions | |
| Servos_mix_matrix (const args_t &args, const conf_t &config=default_config()) | |
| Constructor. | |
| thrust_command_ (thrust_command_t{{{0.0f, 0.0f, 0.0f}}}) | |
| mix_ (config.mix) | |
| trim_ (config.trim) | |
| min_ (config.min) | |
| max_ (config.max) | |
| virtual bool | update (void) |
| Perform conversion from torque/thrust command to servo command. | |
| virtual bool | failsafe (void) |
| virtual bool | set_command (const torque_command_t &torque) |
| sets the torque command | |
| virtual bool | set_command (const thrust_command_t &thrust) |
| sets the thrust command | |
| virtual bool | get_command (torque_command_t &torque) const |
| sets the torque command | |
| virtual bool | get_command (thrust_command_t &thrust) const |
| sets the thrust command | |
Static Public Member Functions | |
| static conf_t | default_config (void) |
| Default configuration. | |
Protected Attributes | |
| std::array< Servo *, N > | servos_ |
| torque_command_t | torque_command_ |
| thrust_command_t | thrust_command_ |
| Mat< N, 6 > | mix_ |
| Mat< N, 1 > | trim_ |
| Mat< N, 1 > | min_ |
| Mat< N, 1 > | max_ |
Servos mix.
| N | Number of servos |
| static conf_t Servos_mix_matrix< N >::default_config | ( | void | ) | [inline, static] |
Default configuration.
| virtual bool Servos_mix_matrix< N >::get_command | ( | torque_command_t & | torque | ) | const [inline, virtual] |
sets the torque command
| command | torque command in body frame |
Implements Servos_mix.
| virtual bool Servos_mix_matrix< N >::get_command | ( | thrust_command_t & | thrust | ) | const [inline, virtual] |
sets the thrust command
| command | thrust command in body frame |
Implements Servos_mix.
| virtual bool Servos_mix_matrix< N >::set_command | ( | const torque_command_t & | torque | ) | [inline, virtual] |
sets the torque command
| command | torque command in body frame |
Implements Servos_mix.
| virtual bool Servos_mix_matrix< N >::set_command | ( | const thrust_command_t & | thrust | ) | [inline, virtual] |
sets the thrust command
| command | thrust command in body frame |
Implements Servos_mix.
 1.7.6.1
1.7.6.1

