|
MAV'RIC
|
|
MAV'RIC
|
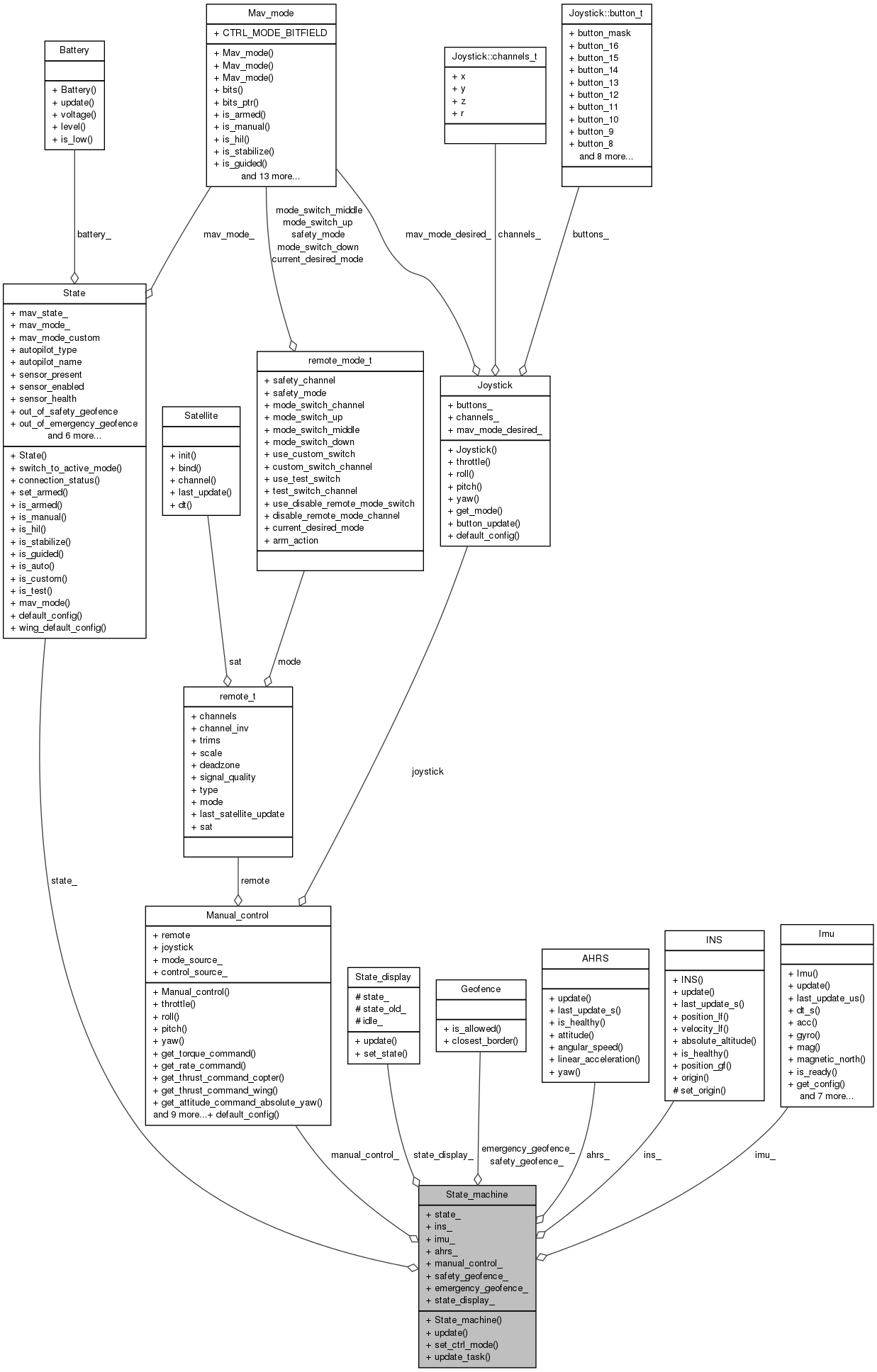
Defines the state machine structure. More...
#include <state_machine.hpp>
Public Member Functions | |
| State_machine (State &state, const INS &ins, const Imu &imu, const AHRS &ahrs, Manual_control &manual_control, Geofence &safety_geofence, Geofence &emergency_geofence, State_display &state_display) | |
| Constructor. | |
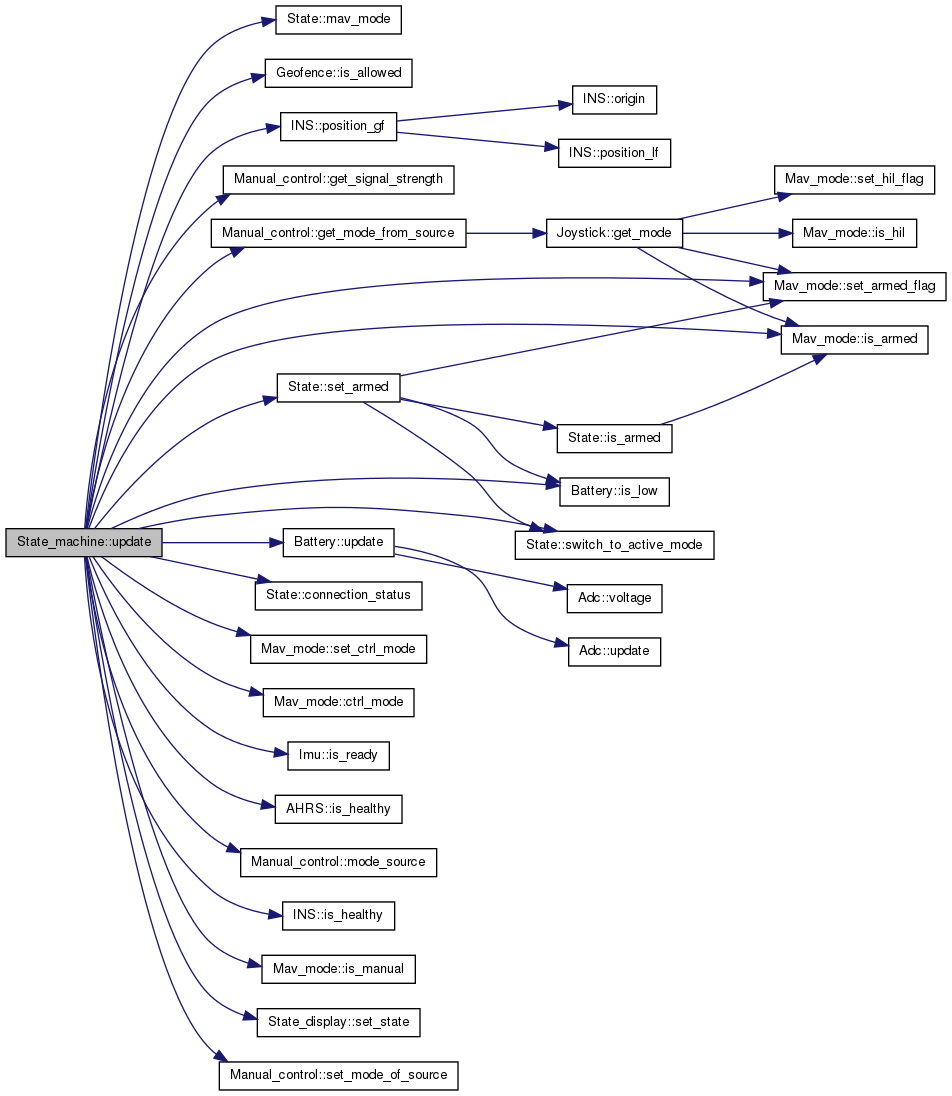
| bool | update (void) |
| Updates the state machine. | |
| bool | set_ctrl_mode (Mav_mode mode) |
Static Public Member Functions | |
| static bool | update_task (State_machine *state_machine) |
Public Attributes | |
| State & | state_ |
| State structure. | |
| const INS & | ins_ |
| Inertial Navigation System. | |
| const Imu & | imu_ |
| Inertial measurement unit. | |
| const AHRS & | ahrs_ |
| Attitude estimation. | |
| Manual_control & | manual_control_ |
| Manual_control. | |
| Geofence & | safety_geofence_ |
| Geofence the MAV should not cross. | |
| Geofence & | emergency_geofence_ |
| Geofence outside which emergency landing is performed. | |
| State_display & | state_display_ |
| Reference to the state display. | |
Defines the state machine structure.
| State_machine::State_machine | ( | State & | state, |
| const INS & | ins, | ||
| const Imu & | imu, | ||
| const AHRS & | ahrs, | ||
| Manual_control & | manual_control, | ||
| Geofence & | safety_geofence, | ||
| Geofence & | emergency_geofence, | ||
| State_display & | state_display | ||
| ) |
Constructor.
| state | Reference to the state |
| ins | Reference to the ins |
| imu | Reference to the imu |
| ahrs | Reference to the ahrs |
| manual_control | Reference to the manual_control |
| safety_geofence | Reference to the geofence the MAV should not cross |
| emergency_geofence | Reference to the geofence outside which emergency landing is performed |
| state_display | Reference to the state display |
| bool State_machine::update | ( | void | ) |
Updates the state machine.
| state_machine | Pointer to the state machine structure |
 1.7.6.1
1.7.6.1

